Definition
Let be a n-dimensional Riemannian manifold for , let be a symmetric 2-tensor field, and let be the Levi-Civita connection. We say that the tensor is a Codazzi tensor if





for all
In the mathematical field of differential geometry, a Codazzi tensor (named after Delfino Codazzi) is a symmetric 2-tensor whose covariant derivative is also symmetric. Such tensors arise naturally in the study of Riemannian manifolds with harmonic curvature or harmonic Weyl tensor. In fact, existence of Codazzi tensors impose strict conditions on the curvature tensor of the manifold. Also, the second fundamental form of an immersed hypersurface in a space form (relative to a local choice of normal field) is a Codazzi tensor.
Let be a n-dimensional Riemannian manifold for , let be a symmetric 2-tensor field, and let be the Levi-Civita connection. We say that the tensor is a Codazzi tensor if
for all
Matsushima and Tanno showed that, on a Kähler manifold, any Codazzi tensor which is hermitian is parallel. Berger showed that, on a compact manifold of nonnegative sectional curvature, any Codazzi tensor h with trgh constant must be parallel. Furthermore, on a compact manifold of nonnegative sectional curvature, if the sectional curvature is strictly positive at least one point, then every symmetric parallel 2-tensor is a constant multiple of the metric.
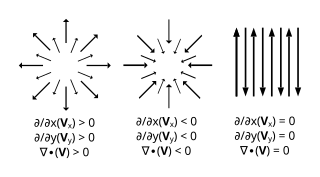
In vector calculus, divergence is a vector operator that operates on a vector field, producing a scalar field giving the quantity of the vector field's source at each point. More technically, the divergence represents the volume density of the outward flux of a vector field from an infinitesimal volume around a given point.
In the mathematical field of differential geometry, the Riemann curvature tensor or Riemann–Christoffel tensor is the most common way used to express the curvature of Riemannian manifolds. It assigns a tensor to each point of a Riemannian manifold. It is a local invariant of Riemannian metrics which measures the failure of the second covariant derivatives to commute. A Riemannian manifold has zero curvature if and only if it is flat, i.e. locally isometric to the Euclidean space. The curvature tensor can also be defined for any pseudo-Riemannian manifold, or indeed any manifold equipped with an affine connection.
In mathematics, the Laplace operator or Laplacian is a differential operator given by the divergence of the gradient of a scalar function on Euclidean space. It is usually denoted by the symbols , (where is the nabla operator), or . In a Cartesian coordinate system, the Laplacian is given by the sum of second partial derivatives of the function with respect to each independent variable. In other coordinate systems, such as cylindrical and spherical coordinates, the Laplacian also has a useful form. Informally, the Laplacian Δf (p) of a function f at a point p measures by how much the average value of f over small spheres or balls centered at p deviates from f (p).
In Riemannian or pseudo-Riemannian geometry, the Levi-Civita connection is the unique affine connection on the tangent bundle of a manifold that preserves the (pseudo-)Riemannian metric and is torsion-free.
In differential geometry, the Ricci curvature tensor, named after Gregorio Ricci-Curbastro, is a geometric object which is determined by a choice of Riemannian or pseudo-Riemannian metric on a manifold. It can be considered, broadly, as a measure of the degree to which the geometry of a given metric tensor differs locally from that of ordinary Euclidean space or pseudo-Euclidean space.
In Riemannian geometry, the sectional curvature is one of the ways to describe the curvature of Riemannian manifolds. The sectional curvature K(σp) depends on a two-dimensional linear subspace σp of the tangent space at a point p of the manifold. It can be defined geometrically as the Gaussian curvature of the surface which has the plane σp as a tangent plane at p, obtained from geodesics which start at p in the directions of σp. The sectional curvature is a real-valued function on the 2-Grassmannian bundle over the manifold.
In the mathematical field of Riemannian geometry, the scalar curvature is a measure of the curvature of a Riemannian manifold. To each point on a Riemannian manifold, it assigns a single real number determined by the geometry of the metric near that point. It is defined by a complicated explicit formula in terms of partial derivatives of the metric components, although it is also characterized by the volume of infinitesimally small geodesic balls. In the context of the differential geometry of surfaces, the scalar curvature is twice the Gaussian curvature, and completely characterizes the curvature of a surface. In higher dimensions, however, the scalar curvature only represents one particular part of the Riemann curvature tensor.

In differential geometry, the holonomy of a connection on a smooth manifold is a general geometrical consequence of the curvature of the connection measuring the extent to which parallel transport around closed loops fails to preserve the geometrical data being transported. For flat connections, the associated holonomy is a type of monodromy and is an inherently global notion. For curved connections, holonomy has nontrivial local and global features.

In mathematics, specifically differential geometry, the infinitesimal geometry of Riemannian manifolds with dimension greater than 2 is too complicated to be described by a single number at a given point. Riemann introduced an abstract and rigorous way to define curvature for these manifolds, now known as the Riemann curvature tensor. Similar notions have found applications everywhere in differential geometry of surfaces and other objects. The curvature of a pseudo-Riemannian manifold can be expressed in the same way with only slight modifications.
In mathematics, a Killing vector field, named after Wilhelm Killing, is a vector field on a Riemannian manifold that preserves the metric. Killing fields are the infinitesimal generators of isometries; that is, flows generated by Killing fields are continuous isometries of the manifold. More simply, the flow generates a symmetry, in the sense that moving each point of an object the same distance in the direction of the Killing vector will not distort distances on the object.

In mathematics, a symmetric space is a Riemannian manifold whose group of symmetries contains an inversion symmetry about every point. This can be studied with the tools of Riemannian geometry, leading to consequences in the theory of holonomy; or algebraically through Lie theory, which allowed Cartan to give a complete classification. Symmetric spaces commonly occur in differential geometry, representation theory and harmonic analysis.
In differential geometry, the Laplace–Beltrami operator is a generalization of the Laplace operator to functions defined on submanifolds in Euclidean space and, even more generally, on Riemannian and pseudo-Riemannian manifolds. It is named after Pierre-Simon Laplace and Eugenio Beltrami.
In the mathematical fields of Riemannian and pseudo-Riemannian geometry, the Ricci decomposition is a way of breaking up the Riemann curvature tensor of a Riemannian or pseudo-Riemannian manifold into pieces with special algebraic properties. This decomposition is of fundamental importance in Riemannian and pseudo-Riemannian geometry.

In differential geometry, the notion of torsion is a manner of characterizing a twist or screw of a moving frame around a curve. The torsion of a curve, as it appears in the Frenet–Serret formulas, for instance, quantifies the twist of a curve about its tangent vector as the curve evolves. In the geometry of surfaces, the geodesic torsion describes how a surface twists about a curve on the surface. The companion notion of curvature measures how moving frames "roll" along a curve "without twisting".
In mathematics, a metric connection is a connection in a vector bundle E equipped with a bundle metric; that is, a metric for which the inner product of any two vectors will remain the same when those vectors are parallel transported along any curve. This is equivalent to:
In Riemannian geometry and pseudo-Riemannian geometry, the Gauss–Codazzi equations are fundamental formulas which link together the induced metric and second fundamental form of a submanifold of a Riemannian or pseudo-Riemannian manifold.
The Yamabe problem refers to a conjecture in the mathematical field of differential geometry, which was resolved in the 1980s. It is a statement about the scalar curvature of Riemannian manifolds:
Let (M,g) be a closed smooth Riemannian manifold. Then there exists a positive and smooth function f on M such that the Riemannian metric fg has constant scalar curvature.
In differential geometry there are a number of second-order, linear, elliptic differential operators bearing the name Laplacian. This article provides an overview of some of them.
In Riemannian geometry, Schur's lemma is a result that says, heuristically, whenever certain curvatures are pointwise constant then they are forced to be globally constant. The proof is essentially a one-step calculation, which has only one input: the second Bianchi identity.













