
Radar is a system that uses radio waves to determine the distance (ranging), direction, and radial velocity of objects relative to the site. It is a radiodetermination method used to detect and track aircraft, ships, spacecraft, guided missiles, motor vehicles, map weather formations, and terrain.

Automatic gain control (AGC) is a closed-loop feedback regulating circuit in an amplifier or chain of amplifiers, the purpose of which is to maintain a suitable signal amplitude at its output, despite variation of the signal amplitude at the input. The average or peak output signal level is used to dynamically adjust the gain of the amplifiers, enabling the circuit to work satisfactorily with a greater range of input signal levels. It is used in most radio receivers to equalize the average volume (loudness) of different radio stations due to differences in received signal strength, as well as variations in a single station's radio signal due to fading. Without AGC the sound emitted from an AM radio receiver would vary to an extreme extent from a weak to a strong signal; the AGC effectively reduces the volume if the signal is strong and raises it when it is weaker. In a typical receiver the AGC feedback control signal is usually taken from the detector stage and applied to control the gain of the IF or RF amplifier stages.
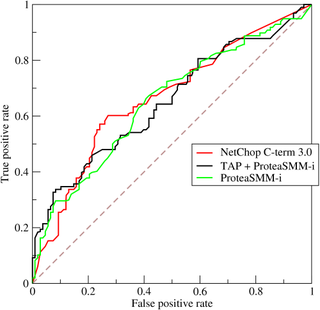
A receiver operating characteristic curve, or ROC curve, is a graphical plot that illustrates the performance of a binary classifier model at varying threshold values.
Detection theory or signal detection theory is a means to measure the ability to differentiate between information-bearing patterns and random patterns that distract from the information.
A pulse-Doppler radar is a radar system that determines the range to a target using pulse-timing techniques, and uses the Doppler effect of the returned signal to determine the target object's velocity. It combines the features of pulse radars and continuous-wave radars, which were formerly separate due to the complexity of the electronics.

Continuous-wave radar is a type of radar system where a known stable frequency continuous wave radio energy is transmitted and then received from any reflecting objects. Individual objects can be detected using the Doppler effect, which causes the received signal to have a different frequency from the transmitted signal, allowing it to be detected by filtering out the transmitted frequency.
A low-probability-of-intercept radar (LPIR) is a radar employing measures to avoid detection by passive radar detection equipment while it is searching for a target or engaged in target tracking. This characteristic is desirable in a radar because it allows finding and tracking an opponent without alerting them to the radar's presence. This also protects the radar installation from anti-radiation missiles (ARMs).
Passive radar is a class of radar systems that detect and track objects by processing reflections from non-cooperative sources of illumination in the environment, such as commercial broadcast and communications signals. It is a specific case of bistatic radar – passive bistatic radar (PBR) – which is a broad type also including the exploitation of cooperative and non-cooperative radar transmitters.
Radar jamming and deception is a form of electronic countermeasures (ECMs) that intentionally sends out radio frequency signals to interfere with the operation of radar by saturating its receiver with noise or false information. Concepts that blanket the radar with signals so its display cannot be read are normally known as jamming, while systems that produce confusing or contradictory signals are known as deception, but it is also common for all such systems to be referred to as jamming.
A radar tracker is a component of a radar system, or an associated command and control (C2) system, that associates consecutive radar observations of the same target into tracks. It is particularly useful when the radar system is reporting data from several different targets or when it is necessary to combine the data from several different radars or other sensors.
A radar system uses a radio-frequency electromagnetic signal reflected from a target to determine information about that target. In any radar system, the signal transmitted and received will exhibit many of the characteristics described below.
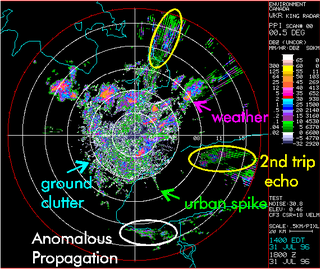
Clutter is the unwanted return (echoes) in electronic systems, particularly in reference to radars. Such echoes are typically returned from ground, sea, rain, animals/insects, chaff and atmospheric turbulences, and can cause serious performance issues with radar systems. What one person considers to be unwanted clutter, another may consider to be a wanted target. However, targets usually refer to point scatterers and clutter to extended scatterers. The clutter may fill a volume or be confined to a surface. A knowledge of the volume or surface area illuminated is required to estimated the echo per unit volume, η, or echo per unit surface area, σ°.
Radar engineering is the design of technical aspects pertaining to the components of a radar and their ability to detect the return energy from moving scatterers — determining an object's position or obstruction in the environment. This includes field of view in terms of solid angle and maximum unambiguous range and velocity, as well as angular, range and velocity resolution. Radar sensors are classified by application, architecture, radar mode, platform, and propagation window.

The Low Flying Detection Radar also called Indian Doppler Radar (INDRA) series of 2D radars were developed by Electronics and Radar Development Establishment (LRDE), of the Defence Research and Development Organisation (DRDO) for the Army and the Air Force. These were then produced by the Bharat Electronics which generally the production partner of LRDE. The INDRA-I is a mobile surveillance radar for low level target detection while the INDRA-II is for ground controlled interception of targets.
Moving target indication (MTI) is a mode of operation of a radar to discriminate a target against the clutter. It describes a variety of techniques used for finding moving objects, like an aircraft, and filter out unmoving ones, like hills or trees. It contrasts with the modern stationary target indication (STI) technique, which uses details of the signal to directly determine the mechanical properties of the reflecting objects and thereby find targets whether they are moving or not.

A missile approach warningsystem (MAW) is part of the avionics package on some military aircraft. A sensor detects attacking missiles. Its automatic warning cues the pilot to make a defensive maneuver and deploy the available countermeasures to disrupt missile tracking.
A minimum detectable signal is a signal at the input of a system whose power allows it to be detected over the background electronic noise of the detector system. It can alternately be defined as a signal that produces a signal-to-noise ratio of a given value m at the output. In practice, m is usually chosen to be greater than unity. In some literature, the name sensitivity is used for this concept.
Pulse-Doppler signal processing is a radar and CEUS performance enhancement strategy that allows small high-speed objects to be detected in close proximity to large slow moving objects. Detection improvements on the order of 1,000,000:1 are common. Small fast moving objects can be identified close to terrain, near the sea surface, and inside storms.
An RF chain is a cascade of electronic components and sub-units which may include amplifiers, filters, mixers, attenuators and detectors. It can take many forms, for example, as a wide-band receiver-detector for electronic warfare (EW) applications, as a tunable narrow-band receiver for communications purposes, as a repeater in signal distribution systems, or as an amplifier and up-converters for a transmitter-driver. In this article, the term RF covers the frequency range "medium Frequencies" up to "microwave Frequencies", i.e. from 100 kHz to 20 GHz.
The railSAR, also known as the ultra-wideband Foliage Penetration Synthetic Aperture Radar, is a rail-guided, low-frequency impulse radar system that can detect and discern target objects hidden behind foliage. It was designed and developed by the U.S. Army Research Laboratory (ARL) in the early 1990s in order to demonstrate the capabilities of an airborne SAR for foliage and ground penetration. However, since conducting accurate, repeatable measurements on an airborne platform was both challenging and expensive, the railSAR was built on the rooftop of a four-story building within the Army Research Laboratory compound along a 104-meter laser-leveled track.
