Related Research Articles
Control theory is a field of control engineering and applied mathematics that deals with the control of dynamical systems in engineered processes and machines. The objective is to develop a model or algorithm governing the application of system inputs to drive the system to a desired state, while minimizing any delay, overshoot, or steady-state error and ensuring a level of control stability; often with the aim to achieve a degree of optimality.

In linear algebra, the singular value decomposition (SVD) is a factorization of a real or complex matrix into a rotation, followed by a rescaling followed by another rotation. It generalizes the eigendecomposition of a square normal matrix with an orthonormal eigenbasis to any matrix. It is related to the polar decomposition.

For statistics and control theory, Kalman filtering, also known as linear quadratic estimation (LQE), is an algorithm that uses a series of measurements observed over time, including statistical noise and other inaccuracies, and produces estimates of unknown variables that tend to be more accurate than those based on a single measurement alone, by estimating a joint probability distribution over the variables for each timeframe. The filter is named after Rudolf E. Kálmán, who was one of the primary developers of its theory.
H∞methods are used in control theory to synthesize controllers to achieve stabilization with guaranteed performance. To use H∞ methods, a control designer expresses the control problem as a mathematical optimization problem and then finds the controller that solves this optimization. H∞ techniques have the advantage over classical control techniques in that H∞ techniques are readily applicable to problems involving multivariate systems with cross-coupling between channels; disadvantages of H∞ techniques include the level of mathematical understanding needed to apply them successfully and the need for a reasonably good model of the system to be controlled. It is important to keep in mind that the resulting controller is only optimal with respect to the prescribed cost function and does not necessarily represent the best controller in terms of the usual performance measures used to evaluate controllers such as settling time, energy expended, etc. Also, non-linear constraints such as saturation are generally not well-handled. These methods were introduced into control theory in the late 1970s-early 1980s by George Zames, J. William Helton , and Allen Tannenbaum.
In linear algebra, a Hankel matrix, named after Hermann Hankel, is a square matrix in which each ascending skew-diagonal from left to right is constant, e.g.:
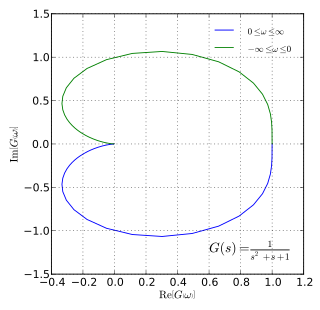
In control theory and stability theory, the Nyquist stability criterion or Strecker–Nyquist stability criterion, independently discovered by the German electrical engineer Felix Strecker at Siemens in 1930 and the Swedish-American electrical engineer Harry Nyquist at Bell Telephone Laboratories in 1932, is a graphical technique for determining the stability of a dynamical system.

A variable-frequency drive is a type of AC motor drive that controls speed and torque by varying the frequency of the input electricity. Depending on its topology, it controls the associated voltage or current variation.
This is an alphabetical list of articles pertaining specifically to electrical and electronics engineering. For a thematic list, please see List of electrical engineering topics. For a broad overview of engineering, see List of engineering topics. For biographies, see List of engineers.
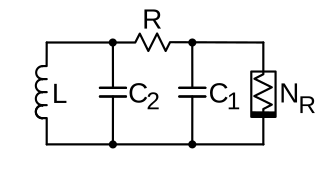
Chua's circuit is a simple electronic circuit that exhibits classic chaotic behavior. This means roughly that it is a "nonperiodic oscillator"; it produces an oscillating waveform that, unlike an ordinary electronic oscillator, never "repeats". It was invented in 1983 by Leon O. Chua, who was a visitor at Waseda University in Japan at that time. The ease of construction of the circuit has made it a ubiquitous real-world example of a chaotic system, leading some to declare it "a paradigm for chaos".
GPS/INS is the use of GPS satellite signals to correct or calibrate a solution from an inertial navigation system (INS). The method is applicable for any GNSS/INS system.
Vector control, also called field-oriented control (FOC), is a variable-frequency drive (VFD) control method in which the stator currents of a three-phase AC or brushless DC electric motor are identified as two orthogonal components that can be visualized with a vector. One component defines the magnetic flux of the motor, the other the torque. The control system of the drive calculates the corresponding current component references from the flux and torque references given by the drive's speed control. Typically proportional-integral (PI) controllers are used to keep the measured current components at their reference values. The pulse-width modulation of the variable-frequency drive defines the transistor switching according to the stator voltage references that are the output of the PI current controllers.
Moving horizon estimation (MHE) is an optimization approach that uses a series of measurements observed over time, containing noise and other inaccuracies, and produces estimates of unknown variables or parameters. Unlike deterministic approaches, MHE requires an iterative approach that relies on linear programming or nonlinear programming solvers to find a solution.
The following outline is provided as an overview of and topical guide to control engineering:

Wassim Michael Haddad is a Lebanese-Greek-American applied mathematician, scientist, and engineer, with research specialization in the areas of dynamical systems and control. His research has led to fundamental breakthroughs in applied mathematics, thermodynamics, stability theory, robust control, dynamical system theory, and neuroscience. Professor Haddad is a member of the faculty of the School of Aerospace Engineering at Georgia Institute of Technology, where he holds the rank of Professor and Chair of the Flight Mechanics and Control Discipline. Dr. Haddad is a member of the Academy of Nonlinear SciencesArchived 2016-03-04 at the Wayback Machine for recognition of paramount contributions to the fields of nonlinear stability theory, nonlinear dynamical systems, and nonlinear control and an IEEE Fellow for contributions to robust, nonlinear, and hybrid control systems.
In control theory, the cross Gramian is a Gramian matrix used to determine how controllable and observable a linear system is.
In signal processing, a kernel adaptive filter is a type of nonlinear adaptive filter. An adaptive filter is a filter that adapts its transfer function to changes in signal properties over time by minimizing an error or loss function that characterizes how far the filter deviates from ideal behavior. The adaptation process is based on learning from a sequence of signal samples and is thus an online algorithm. A nonlinear adaptive filter is one in which the transfer function is nonlinear.
Masreliez theorem describes a recursive algorithm within the technology of extended Kalman filter, named after the Swedish-American physicist John Masreliez, who is its author. The algorithm estimates the state of a dynamic system with the help of often incomplete measurements marred by distortion.
Ghosting is a visual artifact that occurs in magnetic resonance imaging(MRI) scans. This artifact can be a consequence of environmental factors or the human body. Ghosting is a multidimensional artifact that occurs in the MRI in the phase encoded direction after applying the Fourier transform.
In mathematics, specifically in control theory, subspace identification (SID) aims at identifying linear time invariant (LTI) state space models from input-output data. SID does not require that the user parametrizes the system matrices before solving a parametric optimization problem and, as a consequence, SID methods do not suffer from problems related to local minima that often lead to unsatisfactory identification results.

Maamar Bettayeb is a control theorist, educator and inventor. He is the author of publications on understanding the singular value decomposition and model order reduction. Bettayeb is also a promoter of scientific research.
References
- Kenney, C.; Hewer, G. (Feb 1987). "Necessary and sufficient conditions for balancing unstable systems". IEEE Transactions on Automatic Control. 32 (2): 157. doi:10.1109/TAC.1987.1104553.