In mathematics, a quadratic equation is an equation that can be rearranged in standard form as where x represents an unknown value, and a, b, and c represent known numbers, where a ≠ 0. The numbers a, b, and c are the coefficients of the equation and may be distinguished by respectively calling them, the quadratic coefficient, the linear coefficient and the constant coefficient or free term.
In mathematics, the discriminant of a polynomial is a quantity that depends on the coefficients and allows deducing some properties of the roots without computing them. More precisely, it is a polynomial function of the coefficients of the original polynomial. The discriminant is widely used in polynomial factoring, number theory, and algebraic geometry.

In elementary algebra, the quadratic formula is a closed-form expression describing the solutions of a quadratic equation. Other ways of solving quadratic equations, such as completing the square, yield the same solutions.
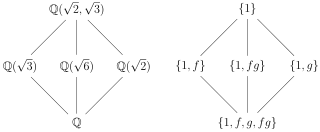
In mathematics, Galois theory, originally introduced by Évariste Galois, provides a connection between field theory and group theory. This connection, the fundamental theorem of Galois theory, allows reducing certain problems in field theory to group theory, which makes them simpler and easier to understand.

In mathematics, factorization (or factorisation, see English spelling differences) or factoring consists of writing a number or another mathematical object as a product of several factors, usually smaller or simpler objects of the same kind. For example, 3 × 5 is an integer factorization of 15, and (x – 2)(x + 2) is a polynomial factorization of x2 – 4.
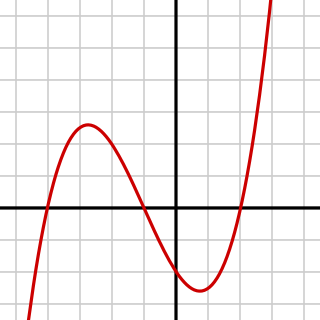
In algebra, a cubic equation in one variable is an equation of the form in which a is not zero.

In mathematics, a quadratic function of a single variable is a function of the form
In mathematics, an irreducible polynomial is, roughly speaking, a polynomial that cannot be factored into the product of two non-constant polynomials. The property of irreducibility depends on the nature of the coefficients that are accepted for the possible factors, that is, the ring to which the coefficients of the polynomial and its possible factors are supposed to belong. For example, the polynomial x2 − 2 is a polynomial with integer coefficients, but, as every integer is also a real number, it is also a polynomial with real coefficients. It is irreducible if it is considered as a polynomial with integer coefficients, but it factors as if it is considered as a polynomial with real coefficients. One says that the polynomial x2 − 2 is irreducible over the integers but not over the reals.

In mathematics, a quartic equation is one which can be expressed as a quartic function equaling zero. The general form of a quartic equation is
In mathematics, a quadratic irrational number is an irrational number that is the solution to some quadratic equation with rational coefficients which is irreducible over the rational numbers. Since fractions in the coefficients of a quadratic equation can be cleared by multiplying both sides by their least common denominator, a quadratic irrational is an irrational root of some quadratic equation with integer coefficients. The quadratic irrational numbers, a subset of the complex numbers, are algebraic numbers of degree 2, and can therefore be expressed as

In algebra, a quartic function is a function of the form
In mathematics, an algebraic equation or polynomial equation is an equation of the form , where P is a polynomial with coefficients in some field, often the field of the rational numbers. For example, is an algebraic equation with integer coefficients and
A solution in radicals or algebraic solution is a closed-form expression, and more specifically a closed-form algebraic expression, that is the solution of a polynomial equation, and relies only on addition, subtraction, multiplication, division, raising to integer powers, and the extraction of nth roots.
In the control system theory, the Routh–Hurwitz stability criterion is a mathematical test that is a necessary and sufficient condition for the stability of a linear time-invariant (LTI) dynamical system or control system. A stable system is one whose output signal is bounded; the position, velocity or energy do not increase to infinity as time goes on. The Routh test is an efficient recursive algorithm that English mathematician Edward John Routh proposed in 1876 to determine whether all the roots of the characteristic polynomial of a linear system have negative real parts. German mathematician Adolf Hurwitz independently proposed in 1895 to arrange the coefficients of the polynomial into a square matrix, called the Hurwitz matrix, and showed that the polynomial is stable if and only if the sequence of determinants of its principal submatrices are all positive. The two procedures are equivalent, with the Routh test providing a more efficient way to compute the Hurwitz determinants than computing them directly. A polynomial satisfying the Routh–Hurwitz criterion is called a Hurwitz polynomial.
In the context of the characteristic polynomial of a differential equation or difference equation, a polynomial is said to be stable if either:
In mathematics, the Routh–Hurwitz theorem gives a test to determine whether all roots of a given polynomial lie in the left half-plane. Polynomials with this property are called Hurwitz stable polynomials. The Routh–Hurwitz theorem is important in dynamical systems and control theory, because the characteristic polynomial of the differential equations of a stable linear system has roots limited to the left half plane. Thus the theorem provides a mathematical test, the Routh–Hurwitz stability criterion, to determine whether a linear dynamical system is stable without solving the system. The Routh–Hurwitz theorem was proved in 1895, and it was named after Edward John Routh and Adolf Hurwitz.

In mathematics, stability theory addresses the stability of solutions of differential equations and of trajectories of dynamical systems under small perturbations of initial conditions. The heat equation, for example, is a stable partial differential equation because small perturbations of initial data lead to small variations in temperature at a later time as a result of the maximum principle. In partial differential equations one may measure the distances between functions using Lp norms or the sup norm, while in differential geometry one may measure the distance between spaces using the Gromov–Hausdorff distance.
In mathematics, a quadratic equation is a polynomial equation of the second degree. The general form is
In mathematics, a univariate polynomial of degree n with real or complex coefficients has n complex roots, if counted with their multiplicities. They form a multiset of n points in the complex plane. This article concerns the geometry of these points, that is the information about their localization in the complex plane that can be deduced from the degree and the coefficients of the polynomial.
In algebra, casus irreducibilis is one of the cases that may arise in solving polynomials of degree 3 or higher with integer coefficients algebraically, i.e., by obtaining roots that are expressed with radicals. It shows that many algebraic numbers are real-valued but cannot be expressed in radicals without introducing complex numbers. The most notable occurrence of casus irreducibilis is in the case of cubic polynomials that have three real roots, which was proven by Pierre Wantzel in 1843. One can see whether a given cubic polynomial is in the so-called casus irreducibilis by looking at the discriminant, via Cardano's formula.



