Related Research Articles
The control unit (CU) is a component of a computer's central processing unit (CPU) that directs the operation of the processor. A CU typically uses a binary decoder to convert coded instructions into timing and control signals that direct the operation of the other units.

In computing, multitasking is the concurrent execution of multiple tasks over a certain period of time. New tasks can interrupt already started ones before they finish, instead of waiting for them to end. As a result, a computer executes segments of multiple tasks in an interleaved manner, while the tasks share common processing resources such as central processing units (CPUs) and main memory. Multitasking automatically interrupts the running program, saving its state and loading the saved state of another program and transferring control to it. This "context switch" may be initiated at fixed time intervals, or the running program may be coded to signal to the supervisory software when it can be interrupted.
In computing, a context switch is the process of storing the state of a process or thread, so that it can be restored and resume execution at a later point, and then restoring a different, previously saved, state. This allows multiple processes to share a single central processing unit (CPU), and is an essential feature of a multiprogramming or multitasking operating system. In a traditional CPU, each process - a program in execution - utilizes the various CPU registers to store data and hold the current state of the running process. However, in a multitasking operating system, the operating system switches between processes or threads to allow the execution of multiple processes simultaneously. For every switch, the operating system must save the state of the currently running process, followed by loading the next process state, which will run on the CPU. This sequence of operations that stores the state of the running process and the loading of the following running process is called a context switch.

In digital computers, an interrupt is a request for the processor to interrupt currently executing code, so that the event can be processed in a timely manner. If the request is accepted, the processor will suspend its current activities, save its state, and execute a function called an interrupt handler to deal with the event. This interruption is often temporary, allowing the software to resume normal activities after the interrupt handler finishes, although the interrupt could instead indicate a fatal error.
In computing, interrupt latency refers to the delay between the start of an Interrupt Request (IRQ) and the start of the respective Interrupt Service Routine (ISR). For many operating systems, devices are serviced as soon as the device's interrupt handler is executed. Interrupt latency may be affected by microprocessor design, interrupt controllers, interrupt masking, and the operating system's (OS) interrupt handling methods.
A real-time operating system (RTOS) is an operating system (OS) for real-time computing applications that processes data and events that have critically defined time constraints. An RTOS is distinct from a time-sharing operating system, such as Unix, which manages the sharing of system resources with a scheduler, data buffers, or fixed task prioritization in a multitasking or multiprogramming environment. Processing time requirements need to be fully understood and bound rather than just kept as a minimum. All processing must occur within the defined constraints. Real-time operating systems are event-driven and preemptive, meaning the OS can monitor the relevant priority of competing tasks, and make changes to the task priority. Event-driven systems switch between tasks based on their priorities, while time-sharing systems switch the task based on clock interrupts.
Direct memory access (DMA) is a feature of computer systems that allows certain hardware subsystems to access main system memory independently of the central processing unit (CPU).
In computing, scheduling is the action of assigning resources to perform tasks. The resources may be processors, network links or expansion cards. The tasks may be threads, processes or data flows.
In computer systems programming, an interrupt handler, also known as an interrupt service routine or ISR, is a special block of code associated with a specific interrupt condition. Interrupt handlers are initiated by hardware interrupts, software interrupt instructions, or software exceptions, and are used for implementing device drivers or transitions between protected modes of operation, such as system calls.
In computing, a non-maskable interrupt (NMI) is a hardware interrupt that standard interrupt-masking techniques in the system cannot ignore. It typically occurs to signal attention for non-recoverable hardware errors. Some NMIs may be masked, but only by using proprietary methods specific to the particular NMI. With regard to SPARC, the non-maskable interrupt (NMI), despite having the highest priority among interrupts, can be prevented from occurring through the use of an interrupt mask.

In Windows NT operating systems, the System Idle Process contains one or more kernel threads which run when no other runnable thread can be scheduled on a CPU. In a multiprocessor system, there is one idle thread associated with each CPU core. For a system with hyperthreading enabled, there is an idle thread for each logical processor.
In computing, a programmable interrupt controller (PIC) is an integrated circuit that helps a microprocessor handle interrupt requests (IRQs) coming from multiple different sources which may occur simultaneously. It helps prioritize IRQs so that the CPU switches execution to the most appropriate interrupt handler (ISR) after the PIC assesses the IRQs' relative priorities. Common modes of interrupt priority include hard priorities, rotating priorities, and cascading priorities. PICs often allow mapping input to outputs in a configurable way. On the PC architecture PIC are typically embedded into a southbridge chip whose internal architecture is defined by the chipset vendor's standards.
In computer science, asynchronous I/O is a form of input/output processing that permits other processing to continue before the I/O operation has finished. A name used for asynchronous I/O in the Windows API is overlapped I/O.
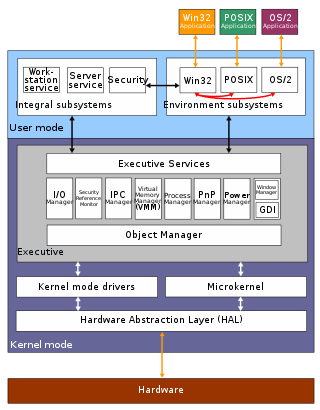
The architecture of Windows NT, a line of operating systems produced and sold by Microsoft, is a layered design that consists of two main components, user mode and kernel mode. It is a preemptive, reentrant multitasking operating system, which has been designed to work with uniprocessor and symmetrical multiprocessor (SMP)-based computers. To process input/output (I/O) requests, it uses packet-driven I/O, which utilizes I/O request packets (IRPs) and asynchronous I/O. Starting with Windows XP, Microsoft began making 64-bit versions of Windows available; before this, there were only 32-bit versions of these operating systems.
In operating systems, an interrupt storm is an event during which a processor receives an inordinate number of interrupts that consume the majority of the processor's time. Interrupt storms are typically caused by hardware devices that do not support interrupt rate limiting.
In a computer, an interrupt request is a hardware signal sent to the processor that temporarily stops a running program and allows a special program, an interrupt handler, to run instead. Hardware interrupts are used to handle events such as receiving data from a modem or network card, key presses, or mouse movements.
In computing, an inter-processor interrupt (IPI), also known as a shoulder tap, is a special type of interrupt by which one processor may interrupt another processor in a multiprocessor system if the interrupting processor requires action from the other processor. Actions that might be requested include:
The interrupt priority level (IPL) is a part of the current system interrupt state, which indicates the interrupt requests that will currently be accepted. The IPL may be indicated in hardware by the registers in a programmable interrupt controller, or in software by a bitmask or integer value and source code of threads.
EKA2 is the second-generation Symbian platform real-time operating system kernel, which originated in the earlier operating system EPOC.

The Parallax P8X32A Propeller is a multi-core processor parallel computer architecture microcontroller chip with eight 32-bit reduced instruction set computer (RISC) central processing unit (CPU) cores. Introduced in 2006, it is designed and sold by Parallax, Inc.
References
- ↑ Russinovich, Mark (October 31, 1997), "Inside NT's Interrupt Handling", Windows IT Pro, Penton Media, archived from the original on September 13, 2016, retrieved April 26, 2016
- ↑ Scheduling, Thread Context, and IRQL, Microsoft, April 26, 2016, pp. 6–7, archived from the original on October 22, 2016, retrieved April 26, 2016