Related Research Articles

In the mathematical field of graph theory, a bipartite graph is a graph whose vertices can be divided into two disjoint and independent sets and , that is, every edge connects a vertex in to one in . Vertex sets and are usually called the parts of the graph. Equivalently, a bipartite graph is a graph that does not contain any odd-length cycles.

In computer science, the clique problem is the computational problem of finding cliques in a graph. It has several different formulations depending on which cliques, and what information about the cliques, should be found. Common formulations of the clique problem include finding a maximum clique, finding a maximum weight clique in a weighted graph, listing all maximal cliques, and solving the decision problem of testing whether a graph contains a clique larger than a given size.
This is a glossary of graph theory. Graph theory is the study of graphs, systems of nodes or vertices connected in pairs by lines or edges.
In computer science, parameterized complexity is a branch of computational complexity theory that focuses on classifying computational problems according to their inherent difficulty with respect to multiple parameters of the input or output. The complexity of a problem is then measured as a function of those parameters. This allows the classification of NP-hard problems on a finer scale than in the classical setting, where the complexity of a problem is only measured as a function of the number of bits in the input. This appears to have been first demonstrated in Gurevich, Stockmeyer & Vishkin (1984). The first systematic work on parameterized complexity was done by Downey & Fellows (1999).

In graph theory, a perfect graph is a graph in which the chromatic number equals the size of the maximum clique, both in the graph itself and in every induced subgraph. In all graphs, the chromatic number is greater than or equal to the size of the maximum clique, but they can be far apart. A graph is perfect when these numbers are equal, and remain equal after the deletion of arbitrary subsets of vertices.
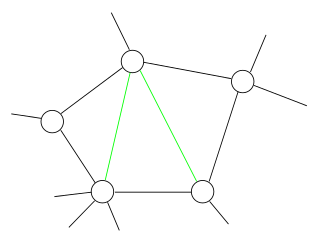
In the mathematical area of graph theory, a chordal graph is one in which all cycles of four or more vertices have a chord, which is an edge that is not part of the cycle but connects two vertices of the cycle. Equivalently, every induced cycle in the graph should have exactly three vertices. The chordal graphs may also be characterized as the graphs that have perfect elimination orderings, as the graphs in which each minimal separator is a clique, and as the intersection graphs of subtrees of a tree. They are sometimes also called rigid circuit graphs or triangulated graphs: a chordal completion of a graph is typically called a triangulation of that graph.
In graph theory, a cograph, or complement-reducible graph, or P4-free graph, is a graph that can be generated from the single-vertex graph K1 by complementation and disjoint union. That is, the family of cographs is the smallest class of graphs that includes K1 and is closed under complementation and disjoint union.
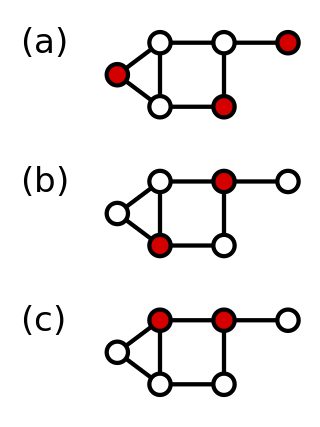
In graph theory, a dominating set for a graph G is a subset D of its vertices, such that any vertex of G is in D, or has a neighbor in D. The domination numberγ(G) is the number of vertices in a smallest dominating set for G.
In graph theory, a connected dominating set and a maximum leaf spanning tree are two closely related structures defined on an undirected graph.

In graph theory, the Grundy number or Grundy chromatic number of an undirected graph is the maximum number of colors that can be used by a greedy coloring strategy that considers the vertices of the graph in sequence and assigns each vertex its first available color, using a vertex ordering chosen to use as many colors as possible. Grundy numbers are named after P. M. Grundy, who studied an analogous concept for directed graphs in 1939. The undirected version was introduced by Christen & Selkow (1979).
In graph theory, an area of mathematics, a claw-free graph is a graph that does not have a claw as an induced subgraph.
In computer science, a kernelization is a technique for designing efficient algorithms that achieve their efficiency by a preprocessing stage in which inputs to the algorithm are replaced by a smaller input, called a "kernel". The result of solving the problem on the kernel should either be the same as on the original input, or it should be easy to transform the output on the kernel to the desired output for the original problem.
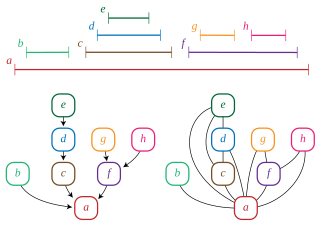
In graph theory, a trivially perfect graph is a graph with the property that in each of its induced subgraphs the size of the maximum independent set equals the number of maximal cliques. Trivially perfect graphs were first studied by but were named by Golumbic (1978); Golumbic writes that "the name was chosen since it is trivial to show that such a graph is perfect." Trivially perfect graphs are also known as comparability graphs of trees, arborescent comparability graphs, and quasi-threshold graphs.
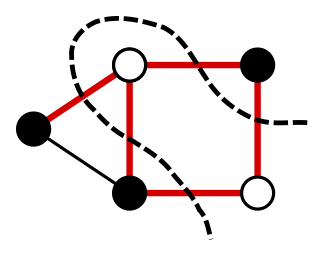
In a graph, a maximum cut is a cut whose size is at least the size of any other cut. That is, it is a partition of the graph's vertices into two complementary sets S and T, such that the number of edges between S and T is as large as possible. Finding such a cut is known as the max-cut problem.
Bidimensionality theory characterizes a broad range of graph problems (bidimensional) that admit efficient approximate, fixed-parameter or kernel solutions in a broad range of graphs. These graph classes include planar graphs, map graphs, bounded-genus graphs and graphs excluding any fixed minor. In particular, bidimensionality theory builds on the graph minor theory of Robertson and Seymour by extending the mathematical results and building new algorithmic tools. The theory was introduced in the work of Demaine, Fomin, Hajiaghayi, and Thilikos, for which the authors received the Nerode Prize in 2015.
In the mathematical field of graph theory, planarization is a method of extending graph drawing methods from planar graphs to graphs that are not planar, by embedding the non-planar graphs within a larger planar graph.
In graph theory, a branch of mathematics, a t-biclique-free graph is a graph that has no Kt,t as a subgraph. A family of graphs is biclique-free if there exists a number t such that the graphs in the family are all t-biclique-free. The biclique-free graph families form one of the most general types of sparse graph family. They arise in incidence problems in discrete geometry, and have also been used in parameterized complexity.

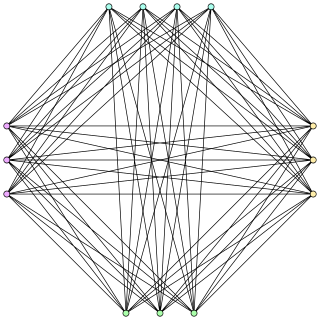
In graph theory, a branch of mathematics, a half graph is a special type of bipartite graph. These graphs are called the half graphs because they have approximately half of the edges of a complete bipartite graph on the same vertices. The name was given to these graphs by Paul Erdős and András Hajnal.

In graph theory, an odd cycle transversal of an undirected graph is a set of vertices of the graph that has a nonempty intersection with every odd cycle in the graph. Removing the vertices of an odd cycle transversal from a graph leaves a bipartite graph as the remaining induced subgraph.
The twin-width of an undirected graph is a natural number associated with the graph, used to study the parameterized complexity of graph algorithms. Intuitively, it measures how similar the graph is to a cograph, a type of graph that can be reduced to a single vertex by repeatedly merging together twins, vertices that have the same neighbors. The twin-width is defined from a sequence of repeated mergers where the vertices are not required to be twins, but have nearly equal sets of neighbors.
References
- ↑ Reed, Bruce; Smith, Kaleigh; Vetta, Adrian (2004), "Finding odd cycle transversals", Operations Research Letters, 32 (4): 299–301, doi:10.1016/j.orl.2003.10.009, MR 2057781 .
- ↑ Niedermeier, Rolf, Invitation to Fixed-Parameter Algorithms, Oxford University Press, p. 184, ISBN 9780198566076
- ↑ Cygan, Marek; Fomin, Fedor V.; Kowalik, Lukasz; Lokshtanov, Daniel; Marx, Daniel; Pilipczuk, Marcin; Pilipczuk, Michal; Saurabh, Saket (2015), Parameterized Algorithms, Springer, p. 555, ISBN 978-3-319-21274-6 .
- ↑ Guo, Jiong; Moser, Hannes; Niedermeier, Rolf (2009), "Iterative compression for exactly solving NP-hard minimization problems", Algorithmics of Large and Complex Networks, Lecture Notes in Computer Science, vol. 5515, Springer, pp. 65–80, doi:10.1007/978-3-642-02094-0_4, ISBN 978-3-642-02093-3 .
- ↑ Fomin, Fedor; Gaspers, Serge; Kratsch, Dieter; Liedloff, Mathieu; Saurabh, Saket (2010), "Iterative compression and exact algorithms", Theoretical Computer Science , 411 (7): 1045–1053, doi: 10.1016/j.tcs.2009.11.012 .
- ↑ Lokshtanov, Daniel; Saurabh, Saket; Sikdar, Somnath (2009), "Simpler parameterized algorithm for OCT", 20th International Workshop on Combinatorial Algorithms, IWOCA 2009, Hradec nad Moravicí, Czech Republic, June 28–July 2, 2009, Revised Selected Papers, Lecture Notes in Computer Science, vol. 5874, Springer, pp. 380–384, doi:10.1007/978-3-642-10217-2_37, ISBN 978-3-642-10216-5 .