Clock synchronization is a topic in computer science and engineering that aims to coordinate otherwise independent clocks. Even when initially set accurately, real clocks will differ after some amount of time due to clock drift, caused by clocks counting time at slightly different rates. There are several problems that occur as a result of clock rate differences and several solutions, some being more acceptable than others in certain contexts.
A fieldbus is a member of a family of industrial digital communication networks used for real-time distributed control. Fieldbus profiles are standardized by the International Electrotechnical Commission (IEC) as IEC 61784/61158.
IEC 61850 is an international standard defining communication protocols for intelligent electronic devices at electrical substations. It is a part of the International Electrotechnical Commission's (IEC) Technical Committee 57 reference architecture for electric power systems. The abstract data models defined in IEC 61850 can be mapped to a number of protocols. Current mappings in the standard are to Manufacturing Message Specification (MMS), GOOSE [see section 3, Terms and definitions, term 3.65 on page 14], SV or SMV, and soon to web services. In the previous version of the standard, GOOSE stood for "Generic Object Oriented Substation Event", but this old definition is still very common in IEC 61850 documentation. These protocols can run over TCP/IP networks or substation LANs using high speed switched Ethernet to obtain the necessary response times below four milliseconds for protective relaying.
The Precision Time Protocol (PTP) is a protocol for clock synchronization throughout a computer network with relatively high precision and therefore potentially high accuracy. In a local area network (LAN), accuracy can be sub-microsecond – making it suitable for measurement and control systems. PTP is used to synchronize financial transactions, mobile phone tower transmissions, sub-sea acoustic arrays, and networks that require precise timing but lack access to satellite navigation signals.
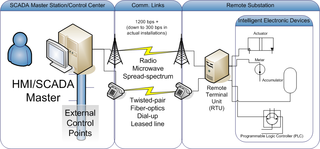
Distributed Network Protocol 3 (DNP3) is a set of communications protocols used between components in process automation systems. Its main use is in utilities such as electric and water companies. Usage in other industries is not common. It was developed for communications between various types of data acquisition and control equipment. It plays a crucial role in SCADA systems, where it is used by SCADA Master Stations, Remote Terminal Units (RTUs), and Intelligent Electronic Devices (IEDs). It is primarily used for communications between a master station and RTUs or IEDs. ICCP, the Inter-Control Center Communications Protocol, is used for inter-master station communications. Competing standards include the older Modbus protocol and the newer IEC 61850 protocol.

Profinet is an industry technical standard for data communication over Industrial Ethernet, designed for collecting data from, and controlling equipment in industrial systems, with a particular strength in delivering data under tight time constraints. The standard is maintained and supported by Profibus and Profinet International, an umbrella organization headquartered in Karlsruhe, Germany.
EtherCAT is an Ethernet-based fieldbus system developed by Beckhoff Automation. The protocol is standardized in IEC 61158 and is suitable for both hard and soft real-time computing requirements in automation technology.
Sercos III is the third generation of the Sercos interface, a standardized open digital interface for the communication between industrial controls, motion devices, input/output devices (I/O), and Ethernet nodes, such as PCs. Sercos III applies the hard real-time features of the Sercos interface to Ethernet. It is based upon the Ethernet standard. Work began on Sercos III in 2003, with vendors releasing first products supporting it in 2005.
Synchronous Ethernet, also referred as SyncE, is an ITU-T standard for computer networking that facilitates the transference of clock signals over the Ethernet physical layer. This signal can then be made traceable to an external clock.

High-availability Seamless Redundancy (HSR) is a network protocol for Ethernet that provides seamless failover against failure of any single network component. PRP and HSR are independent of the application-protocol and can be used by most Industrial Ethernet protocols in the IEC 61784 suite. HSR does not cover the failure of end nodes, but redundant nodes can be connected via HSR.
Parallel Redundancy Protocol (PRP) is a network protocol standard for Ethernet that provides seamless failover against failure of any network component. This redundancy is invisible to the application.

PTPd is an open source implementation of the Precision Time Protocol for Unix-like computers.
White Rabbit is the name of a collaborative project including CERN, GSI Helmholtz Centre for Heavy Ion Research and other partners from universities and industry to develop a fully deterministic Ethernet-based network for general purpose data transfer and sub-nanosecond accuracy time transfer. Its initial use was as a timing distribution network for control and data acquisition timing of the accelerator sites at CERN as well as in GSI's Facility for Antiproton and Ion Research (FAIR) project. The hardware designs as well as the source code are publicly available. The name of the project is a reference to the White Rabbit appearing in Lewis Carroll's novel Alice's Adventures in Wonderland.

Media Redundancy Protocol (MRP) is a data network protocol standardized by the International Electrotechnical Commission as IEC 62439-2. It allows rings of Ethernet switches to overcome any single failure with recovery time much faster than achievable with Spanning Tree Protocol. It is suitable to most industrial Ethernet applications.
AES67 is a technical standard for audio over IP and audio over Ethernet (AoE) interoperability. The standard was developed by the Audio Engineering Society and first published in September 2013. It is a layer 3 protocol suite based on existing standards and is designed to allow interoperability between various IP-based audio networking systems such as RAVENNA, Wheatnet, Livewire, Q-LAN and Dante.
Time-Sensitive Networking (TSN) is a set of standards under development by the Time-Sensitive Networking task group of the IEEE 802.1 working group. The TSN task group was formed in November 2012 by renaming the existing Audio Video Bridging Task Group and continuing its work. The name changed as a result of the extension of the working area of the standardization group. The standards define mechanisms for the time-sensitive transmission of data over deterministic Ethernet networks.

IEC/IEEE 61850-9-3 or PUP is an international standard for precise time distribution and clock synchronization in electrical grids with an accuracy of 1 μs.
It supports precise time stamping of voltage and current measurement for differential protection, wide area monitoring and protection, busbar protection and event recording.
It can be used to ensure deterministic operation of critical functions in the automation system.
It belongs to the IEC 61850 standard suite for communication networks and systems for power utility automation.
timed is an operating system program that maintains the system time in synchronization with time servers using the Time Synchronization Protocol (TSP) developed by Riccardo Gusella and Stefano Zatti. Gusella and Zatti had done earlier related work on their TEMPO algorithm. The Time Synchronization Protocol specification refers to an election algorithm and a synchronization mechanism specified in other technical reports listed as "to appear".

Audio Video Bridging (AVB) is a common name for a set of technical standards that provide improved synchronization, low latency, and reliability for switched Ethernet networks. AVB embodies the following technologies and standards:



