In mathematics, a projective range is a set of points in projective geometry considered in a unified fashion. A projective range may be a projective line or a conic. A projective range is the dual of a pencil of lines on a given point. For instance, a correlation interchanges the points of a projective range with the lines of a pencil. A projectivity is said to act from one range to another, though the two ranges may coincide as sets.

Mathematics includes the study of such topics as quantity, structure (algebra), space (geometry), and change. It has no generally accepted definition.

Projective geometry is a topic in mathematics. It is the study of geometric properties that are invariant with respect to projective transformations. This means that, compared to elementary geometry, projective geometry has a different setting, projective space, and a selective set of basic geometric concepts. The basic intuitions are that projective space has more points than Euclidean space, for a given dimension, and that geometric transformations are permitted that transform the extra points to Euclidean points, and vice versa.

In geometry, a real projective line is an extension of the usual concept of line that has been historically introduced to solve a problem set by visual perspective: two parallel lines do not intersect but seem to intersect "at infinity". For solving this problem, points at infinity have been introduced, in such a way that in a real projective plane, two distinct projective lines meet in exactly one point. The set of these points at infinity, the "horizon" of the visual perspective in the plane, is a real projective line. It is the circle of directions emanating from an observer situated at any point, with opposite points identified. A model of the real projective line is the projectively extended real line. Drawing a line to represent the horizon in visual perspective, an additional point at infinity is added to represent the collection of lines parallel to the horizon.
A projective range expresses projective invariance of the relation of projective harmonic conjugates. Indeed, three points on a projective line determine a fourth by this relation. Application of a projectivity to this quadruple results in four points likewise in the harmonic relation. Such a quadruple of points is termed a harmonic range. In 1940 Julian Coolidge described this structure and identified its originator: [1]
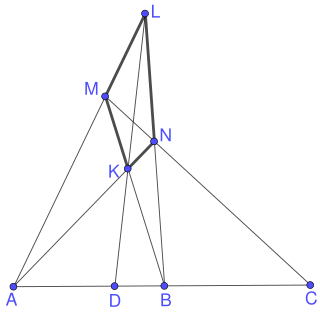
In projective geometry, the harmonic conjugate point of an ordered triple of points on the real projective line is defined by the following construction:

Julian Lowell Coolidge was an American mathematician, historian and a professor and chairman of the Harvard University Mathematics Department.
- Two fundamental one-dimensional forms such as point ranges, pencils of lines, or of planes are defined as projective, when their members are in one-to-one correspondence, and a harmonic set of one ... corresponds to a harmonic set of the other. ... If two one-dimensional forms are connected by a train of projections and intersections, harmonic elements will correspond to harmonic elements, and they are projective in the sense of Von Staudt.