Collection of proofs of equations involving trigonometric functions
There are several equivalent ways for defining trigonometric functions, and the proofs of the trigonometric identities between them depend on the chosen definition. The oldest and most elementary definitions are based on the geometry of right triangles and the ratio between their sides. The proofs given in this article use these definitions, and thus apply to non-negative angles not greater than a right angle. For greater and negative angles, see Trigonometric functions.
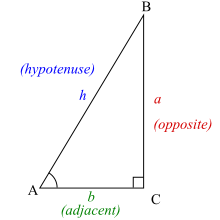
Trigonometric functions specify the relationships between side lengths and interior angles of a right triangle. For example, the sine of angle θ is defined as being the length of the opposite side divided by the length of the hypotenuse.
The six trigonometric functions are defined for every real number, except, for some of them, for angles that differ from 0 by a multiple of the right angle (90°). Referring to the diagram at the right, the six trigonometric functions of θ are, for angles smaller than the right angle:
Ratio identities
In the case of angles smaller than a right angle, the following identities are direct consequences of above definitions through the division identity
They remain valid for angles greater than 90° and for negative angles.
Or
Complementary angle identities
Two angles whose sum is π/2 radians (90 degrees) are complementary. In the diagram, the angles at vertices A and B are complementary, so we can exchange a and b, and change θ to π/2−θ, obtaining:
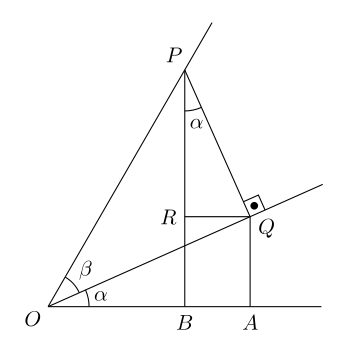
Draw a horizontal line (the x-axis); mark an origin O. Draw a line from O at an angle above the horizontal line and a second line at an angle above that; the angle between the second line and the x-axis is
Place P on the line defined by at a unit distance from the origin.
Let PQ be a line perpendicular to line OQ defined by angle , drawn from point Q on this line to point P. OQP is a right angle.
Let QA be a perpendicular from point A on the x-axis to Q and PB be a perpendicular from point B on the x-axis to P. OAQ and OBP are right angles.
Draw R on PB so that QR is parallel to the x-axis.
But replacing the angle with its doubled version, which achieves the same result in the left side of the equation, yields
It follows that
.
Expanding the square and simplifying on the left hand side of the equation gives
.
Because the imaginary and real parts have to be the same, we are left with the original identities
,
and also
.
Half-angle identities
The two identities giving the alternative forms for cos 2θ lead to the following equations:
The sign of the square root needs to be chosen properly—note that if 2π is added to θ, the quantities inside the square roots are unchanged, but the left-hand-sides of the equations change sign. Therefore, the correct sign to use depends on the value of θ.
For the tan function, the equation is:
Then multiplying the numerator and denominator inside the square root by (1 + cos θ) and using Pythagorean identities leads to:
Also, if the numerator and denominator are both multiplied by (1 - cos θ), the result is:
This also gives:
Similar manipulations for the cot function give:
Miscellaneous – the triple tangent identity
If half circle (for example, , and are the angles of a triangle),
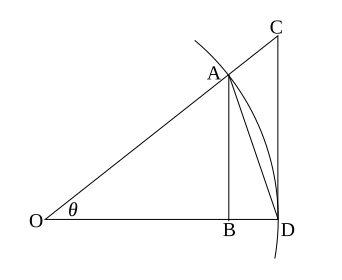
Illustration of the sine and tangent inequalities.
The figure at the right shows a sector of a circle with radius 1. The sector is θ/(2π) of the whole circle, so its area is θ/2. We assume here that θ < π/2.
The area of triangle OAD is AB/2, or sin(θ)/2. The area of triangle OCD is CD/2, or tan(θ)/2.
Since triangle OAD lies completely inside the sector, which in turn lies completely inside triangle OCD, we have
This geometric argument relies on definitions of arc length and area, which act as assumptions, so it is rather a condition imposed in construction of trigonometric functions than a provable property.[2] For the sine function, we can handle other values. If θ > π/2, then θ > 1. But sin θ ≤ 1 (because of the Pythagorean identity), so sin θ < θ. So we have
For negative values of θ we have, by the symmetry of the sine function
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.