In mathematics, an embedding is one instance of some mathematical structure contained within another instance, such as a group that is a subgroup.
In differential geometry, a Riemannian manifold is a geometric space on which many geometric notions such as distance, angles, length, volume, and curvature are defined. Euclidean space, the -sphere, hyperbolic space, and smooth surfaces in three-dimensional space, such as ellipsoids and paraboloids, are all examples of Riemannian manifolds. Riemannian manifolds are named after German mathematician Bernhard Riemann, who first conceptualized them.
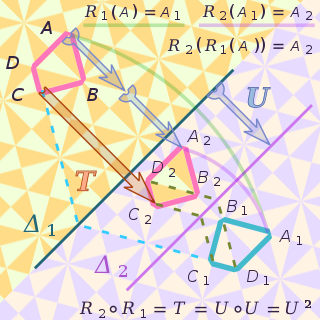
In mathematics, an isometry is a distance-preserving transformation between metric spaces, usually assumed to be bijective. The word isometry is derived from the Ancient Greek: ἴσος isos meaning "equal", and μέτρον metron meaning "measure". If the transformation is from a metric space to itself, it is a kind of geometric transformation known as a motion.
In Riemannian geometry, the sectional curvature is one of the ways to describe the curvature of Riemannian manifolds. The sectional curvature K(σp) depends on a two-dimensional linear subspace σp of the tangent space at a point p of the manifold. It can be defined geometrically as the Gaussian curvature of the surface which has the plane σp as a tangent plane at p, obtained from geodesics which start at p in the directions of σp. The sectional curvature is a real-valued function on the 2-Grassmannian bundle over the manifold.
In mathematical physics, a pseudo-Riemannian manifold, also called a semi-Riemannian manifold, is a differentiable manifold with a metric tensor that is everywhere nondegenerate. This is a generalization of a Riemannian manifold in which the requirement of positive-definiteness is relaxed.

In mathematics, hyperbolic space of dimension n is the unique simply connected, n-dimensional Riemannian manifold of constant sectional curvature equal to −1. It is homogeneous, and satisfies the stronger property of being a symmetric space. There are many ways to construct it as an open subset of with an explicitly written Riemannian metric; such constructions are referred to as models. Hyperbolic 2-space, H2, which was the first instance studied, is also called the hyperbolic plane.
This is a glossary of some terms used in Riemannian geometry and metric geometry — it doesn't cover the terminology of differential topology.
This is a glossary of terms specific to differential geometry and differential topology. The following three glossaries are closely related:

In differential geometry and complex geometry, a complex manifold is a manifold with a complex structure, that is an atlas of charts to the open unit disc in the complex coordinate space , such that the transition maps are holomorphic.

In mathematics, a submanifold of a manifold is a subset which itself has the structure of a manifold, and for which the inclusion map satisfies certain properties. There are different types of submanifolds depending on exactly which properties are required. Different authors often have different definitions.
In differential geometry, the Laplace–Beltrami operator is a generalization of the Laplace operator to functions defined on submanifolds in Euclidean space and, even more generally, on Riemannian and pseudo-Riemannian manifolds. It is named after Pierre-Simon Laplace and Eugenio Beltrami.

In mathematics, a manifold is a topological space that locally resembles Euclidean space near each point. More precisely, an -dimensional manifold, or -manifold for short, is a topological space with the property that each point has a neighborhood that is homeomorphic to an open subset of -dimensional Euclidean space.
In differential geometry, a field of mathematics, a normal bundle is a particular kind of vector bundle, complementary to the tangent bundle, and coming from an embedding.
In differential geometry, a branch of mathematics, a Riemannian submersion is a submersion from one Riemannian manifold to another that respects the metrics, meaning that it is an orthogonal projection on tangent spaces.
In mathematics, a complete manifoldM is a (pseudo-) Riemannian manifold for which, starting at any point p, there are straight paths extending infinitely in all directions.

In mathematics, an immersion is a differentiable function between differentiable manifolds whose differential pushforward is everywhere injective. Explicitly, f : M → N is an immersion if
In differential geometry, Mikhail Gromov's filling area conjecture asserts that the hemisphere has minimum area among the orientable surfaces that fill a closed curve of given length without introducing shortcuts between its points.
In mathematics, a Riemannian manifold is said to be flat if its Riemann curvature tensor is everywhere zero. Intuitively, a flat manifold is one that "locally looks like" Euclidean space in terms of distances and angles, e.g. the interior angles of a triangle add up to 180°.
In geometry, if X is a manifold with an action of a topological group G by analytical diffeomorphisms, the notion of a (G, X)-structure on a topological space is a way to formalise it being locally isomorphic to X with its G-invariant structure; spaces with a (G, X)-structure are always manifolds and are called (G, X)-manifolds. This notion is often used with G being a Lie group and X a homogeneous space for G. Foundational examples are hyperbolic manifolds and affine manifolds.
In the mathematical subject of geometric group theory, the Švarc–Milnor lemma is a statement which says that a group , equipped with a "nice" discrete isometric action on a metric space , is quasi-isometric to .













