
Dextre, also known as the Special Purpose Dexterous Manipulator (SPDM), is a two-armed robot, or telemanipulator, which is part of the Mobile Servicing System on the International Space Station (ISS), and does repairs that would otherwise require astronauts to do spacewalks. It was launched on March 11, 2008, on the mission STS-123.
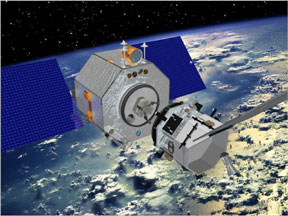
Orbital Express was a space mission managed by the United States Defense Advanced Research Projects Agency (DARPA) and a team led by engineers at NASA's Marshall Space Flight Center (MSFC). The Orbital Express program was aimed at developing "a safe and cost-effective approach to autonomously service satellites in orbit". The system consisted of two spacecraft: the ASTRO servicing satellite, and a prototype modular next-generation serviceable satellite; NEXTSat. The mission launched from Cape Canaveral Air Force Station on 8 March 2007, aboard an Atlas V expendable launch vehicle. The launch was part of the United States Air Force Space Test Program STP-1 mission.

An EXpedite the PRocessing of Experiments to Space Station (ExPRESS) Logistics Carrier (ELC) is an unpressurized attached payload platform for the International Space Station (ISS) that provides mechanical mounting surfaces, electrical power, and command and data handling services for Orbital Replacement Units (ORUs) as well as science experiments on the ISS. The ELCs were developed primarily at the Goddard Space Flight Center in Greenbelt, Maryland, with support from JSC, KSC, and MSFC. ELC was formerly called "Express Pallet" and is the unpressurized counterpart to the pressurized ExPRESS Rack. An ELC provides scientists with a platform and infrastructure to deploy experiments in the vacuum of space without requiring a separate dedicated Earth-orbiting satellite.

STS-135 was the 135th and final mission of the American Space Shuttle program. It used the orbiter Atlantis and hardware originally processed for the STS-335 contingency mission, which was not flown. STS-135 launched on July 8, 2011, and landed on July 21, 2011, following a one-day mission extension. The four-person crew was the smallest of any shuttle mission since STS-6 in April 1983. The mission's primary cargo was the Multi-Purpose Logistics Module (MPLM) Raffaello and a Lightweight Multi-Purpose Carrier (LMC), which were delivered to the International Space Station (ISS). The flight of Raffaello marked the only time that Atlantis carried an MPLM.

An orbital propellant depot is a cache of propellant that is placed in orbit around Earth or another body to allow spacecraft or the transfer stage of the spacecraft to be fueled in space. It is one of the types of space resource depots that have been proposed for enabling infrastructure-based space exploration. Many different depot concepts exist depending on the type of fuel to be supplied, location, or type of depot which may also include a propellant tanker that delivers a single load to a spacecraft at a specified orbital location and then departs. In-space fuel depots are not necessarily located near or at a space station.

Kounotori 2, also known as HTV-2, was launched in January 2011 and was the second flight of the Japanese H-II Transfer Vehicle to resupply the International Space Station (ISS). It was launched by the H-IIB Launch Vehicle No. 2 manufactured by Mitsubishi Heavy Industries (MHI) and JAXA. After the supplies were unloaded, Kounotori 2 was loaded with waste material from ISS, including used experiment equipment and used clothes. Kounotori 2 was then unberthed and separated from the ISS and burned up upon reentering the atmosphere on 30 March 2011.

The US Orbital Segment (USOS) is the name given to the components of the International Space Station (ISS) constructed and operated by the United States National Aeronautics and Space Administration (NASA), European Space Agency (ESA), Canadian Space Agency (CSA) and Japan Aerospace Exploration Agency (JAXA). The segment consists of eleven pressurized components and various external elements, almost all of which were delivered by the Space Shuttle.

SpaceX CRS-1, also known as SpX-1, was SpaceX's first operational cargo mission to the International Space Station, under their Commercial Resupply Services (CRS-1) contract with NASA. It was the third flight for the uncrewed Dragon cargo spacecraft, and the fourth overall flight for the company's two-stage Falcon 9 launch vehicle. The launch occurred on 8 October 2012 at 00:34:07 UTC.

Docking and berthing of spacecraft is the joining of two space vehicles. This connection can be temporary, or partially permanent such as for space station modules.
Space Infrastructure Servicing (SIS) is a spacecraft concept being developed by Canadian aerospace firm MDA to operate as a small-scale in-space refueling depot for communication satellites in geosynchronous orbit.

SpaceX CRS-4, also known as SpX-4, was a Commercial Resupply Service mission to the International Space Station (ISS), contracted to NASA, which was launched on 21 September 2014 and arrived at the space station on 23 September 2014. It was the sixth flight for SpaceX's uncrewed Dragon cargo spacecraft, and the fourth SpaceX operational mission contracted to NASA under a Commercial Resupply Services contract. The mission brought equipment and supplies to the space station, including the first 3D printer to be tested in space, a device to measure wind speed on Earth, and small satellites to be launched from the station. It also brought 20 mice for long-term research aboard the ISS.

Nanoracks LLC is a private in-space services company which builds space hardware and in-space repurposing tools. The company also facilitates experiments and launches of CubeSats to Low Earth Orbit.

NG-11, previously known as OA-11, is the twelfth flight of the Northrop Grumman robotic resupply spacecraft Cygnus and its eleventh flight to the International Space Station under the Commercial Resupply Services (CRS-1) contract with NASA. The mission launched on 17 April 2019 at 20:46:07 UTC. This is the last mission from the extended CRS-1 contract; follow-up missions are part of the CRS-2 contract. Cygnus NG-11 was also the first mission to load critical hardware onto Cygnus within the last 24 hours prior to launch, a new Antares feature.

SpaceX CRS-16, also known as SpX-16, was a Commercial Resupply Service mission to the International Space Station launched on 5 December 2018 aboard a Falcon 9 launch vehicle. The mission was contracted by NASA and is flown by SpaceX.

NG-13, previously known as OA-13, was the fourteenth flight of the Northrop Grumman robotic resupply spacecraft Cygnus and its thirteenth flight to the International Space Station (ISS) under the Commercial Resupply Services (CRS-1) contract with NASA. The mission launched on 15 February 2020 at 20:21:01 UTC after nearly a week of delays. This is the second launch of Cygnus under the CRS-2 contract.

SpaceX CRS-21, also known as SpX-21, was a Commercial Resupply Service mission to the International Space Station which launched on 6 December 2020. The mission was contracted by NASA and was flown by SpaceX using a Cargo Dragon 2. This was the first flight for SpaceX under NASA's CRS Phase 2 contract awarded in January 2016. This was also the first Cargo Dragon of the new Dragon 2 variant, as well as the first Cargo Dragon flight that was docked at the same time as a Crew Dragon spacecraft. This mission used Booster B1058.4, becoming the first NASA mission to reuse a booster previously used on a non-NASA mission. This was also first time SpaceX launched a NASA payload on a booster with more than one previous flight.

NG-15, previously known as OA-15, was the fifteenth launch of the Northrop Grumman robotic resupply spacecraft Cygnus and its fourteenth flight to the International Space Station (ISS) under the Commercial Resupply Services (CRS) contract with NASA. The mission launched on 20 February 2021 at 17:36:50 UTC. This is the fourth launch of Cygnus under the CRS-2 contract.

Cygnus NG-16, previously known as Cygnus OA-16, was the sixteenth flight of the Northrop Grumman robotic resupply spacecraft Cygnus and its fifteenth flight to the International Space Station (ISS) under the Commercial Resupply Services (CRS-2) contract with NASA. The mission was launched on 10 August 2021 at 22:01:05 UTC, for a (planned) 90-day mission at the ISS. This was the fifth launch of Cygnus under the CRS-2 contract.

SpaceX CRS-23, also known as SpX-23, was a Commercial Resupply Service mission to the International Space Station, successfully launched on 29 August 2021 and docking the following day. The mission was contracted by NASA and was flown by SpaceX using the Cargo Dragon C208. This was the third flight for SpaceX under NASA's CRS Phase 2 contract awarded in January 2016. It was the second mission for this reusable capsule.

NG-18 was the eighteenth flight of the Northrop Grumman robotic resupply spacecraft Cygnus and its seventeenth flight to the International Space Station (ISS) under the Commercial Resupply Services (CRS-2) contract with NASA. The mission successfully launched on 7 November 2022 at 10:32:42 UTC. This was the seventh launch of Cygnus under the CRS-2 contract.
