Controllability is an important property of a control system and plays a crucial role in many control problems, such as stabilization of unstable systems by feedback, or optimal control.
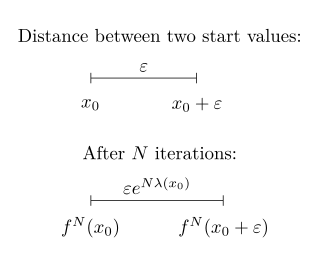
In mathematics, the Lyapunov exponent or Lyapunov characteristic exponent of a dynamical system is a quantity that characterizes the rate of separation of infinitesimally close trajectories. Quantitatively, two trajectories in phase space with initial separation vector diverge at a rate given by

Various types of stability may be discussed for the solutions of differential equations or difference equations describing dynamical systems. The most important type is that concerning the stability of solutions near to a point of equilibrium. This may be discussed by the theory of Aleksandr Lyapunov. In simple terms, if the solutions that start out near an equilibrium point stay near forever, then is Lyapunov stable. More strongly, if is Lyapunov stable and all solutions that start out near converge to , then is said to be asymptotically stable. The notion of exponential stability guarantees a minimal rate of decay, i.e., an estimate of how quickly the solutions converge. The idea of Lyapunov stability can be extended to infinite-dimensional manifolds, where it is known as structural stability, which concerns the behavior of different but "nearby" solutions to differential equations. Input-to-state stability (ISS) applies Lyapunov notions to systems with inputs.
In control systems, sliding mode control (SMC) is a nonlinear control method that alters the dynamics of a nonlinear system by applying a discontinuous control signal that forces the system to "slide" along a cross-section of the system's normal behavior. The state-feedback control law is not a continuous function of time. Instead, it can switch from one continuous structure to another based on the current position in the state space. Hence, sliding mode control is a variable structure control method. The multiple control structures are designed so that trajectories always move toward an adjacent region with a different control structure, and so the ultimate trajectory will not exist entirely within one control structure. Instead, it will slide along the boundaries of the control structures. The motion of the system as it slides along these boundaries is called a sliding mode and the geometrical locus consisting of the boundaries is called the sliding (hyper)surface. In the context of modern control theory, any variable structure system, like a system under SMC, may be viewed as a special case of a hybrid dynamical system as the system both flows through a continuous state space but also moves through different discrete control modes.
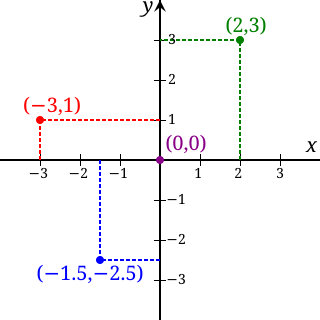
In mathematics, the real coordinate space of dimension n, denoted Rn or , is the set of the n-tuples of real numbers, that is the set of all sequences of n real numbers. Special cases are called the real lineR1 and the real coordinate planeR2. With component-wise addition and scalar multiplication, it is a real vector space, and its elements are called coordinate vectors.
Convex optimization is a subfield of mathematical optimization that studies the problem of minimizing convex functions over convex sets. Many classes of convex optimization problems admit polynomial-time algorithms, whereas mathematical optimization is in general NP-hard.
Nonlinear control theory is the area of control theory which deals with systems that are nonlinear, time-variant, or both. Control theory is an interdisciplinary branch of engineering and mathematics that is concerned with the behavior of dynamical systems with inputs, and how to modify the output by changes in the input using feedback, feedforward, or signal filtering. The system to be controlled is called the "plant". One way to make the output of a system follow a desired reference signal is to compare the output of the plant to the desired output, and provide feedback to the plant to modify the output to bring it closer to the desired output.
LaSalle's invariance principle is a criterion for the asymptotic stability of an autonomous dynamical system.

Feedback linearization is a common strategy employed in nonlinear control to control nonlinear systems. Feedback linearization techniques may be applied to nonlinear control systems of the form
In control theory, a control-Lyapunov function (CLF) is an extension of the idea of Lyapunov function to systems with control inputs. The ordinary Lyapunov function is used to test whether a dynamical system is (Lyapunov) stable or asymptotically stable. Lyapunov stability means that if the system starts in a state in some domain D, then the state will remain in D for all time. For asymptotic stability, the state is also required to converge to . A control-Lyapunov function is used to test whether a system is asymptotically stabilizable, that is whether for any state x there exists a control such that the system can be brought to the zero state asymptotically by applying the control u.
Flatness in systems theory is a system property that extends the notion of controllability from linear systems to nonlinear dynamical systems. A system that has the flatness property is called a flat system. Flat systems have a (fictitious) flat output, which can be used to explicitly express all states and inputs in terms of the flat output and a finite number of its derivatives.
Artstein's theorem states that a nonlinear dynamical system in the control-affine form
In control theory, backstepping is a technique developed circa 1990 by Petar V. Kokotovic and others for designing stabilizing controls for a special class of nonlinear dynamical systems. These systems are built from subsystems that radiate out from an irreducible subsystem that can be stabilized using some other method. Because of this recursive structure, the designer can start the design process at the known-stable system and "back out" new controllers that progressively stabilize each outer subsystem. The process terminates when the final external control is reached. Hence, this process is known as backstepping.
In nonlinear control, the technique of Lyapunov redesign refers to the design where a stabilizing state feedback controller can be constructed with knowledge of the Lyapunov function . Consider the system
In nonlinear control and stability theory, the circle criterion is a stability criterion for nonlinear time-varying systems. It can be viewed as a generalization of the Nyquist stability criterion for linear time-invariant (LTI) systems.
In stability theory and nonlinear control, Massera's lemma, named after José Luis Massera, deals with the construction of the Lyapunov function to prove the stability of a dynamical system. The lemma appears in as the first lemma in section 12, and in more general form in as lemma 2. In 2004, Massera's original lemma for single variable functions was extended to the multivariable case, and the resulting lemma was used to prove the stability of switched dynamical systems, where a common Lyapunov function describes the stability of multiple modes and switching signals.
A variable structure system, or VSS, is a discontinuous nonlinear system of the form
In statistics, an approximate entropy (ApEn) is a technique used to quantify the amount of regularity and the unpredictability of fluctuations over time-series data. For example, consider two series of data:
Input-to-state stability (ISS) is a stability notion widely used to study stability of nonlinear control systems with external inputs. Roughly speaking, a control system is ISS if it is globally asymptotically stable in the absence of external inputs and if its trajectories are bounded by a function of the size of the input for all sufficiently large times. The importance of ISS is due to the fact that the concept has bridged the gap between input–output and state-space methods, widely used within the control systems community.
GPOPS-II is a general-purpose MATLAB software for solving continuous optimal control problems using hp-adaptive Gaussian quadrature collocation and sparse nonlinear programming. The acronym GPOPS stands for "General Purpose OPtimal Control Software", and the Roman numeral "II" refers to the fact that GPOPS-II is the second software of its type.











































