Related Research Articles

Parallel ATA (PATA), originally AT Attachment, also known as Integrated Drive Electronics (IDE), is a standard interface designed for IBM PC-compatible computers. It was first developed by Western Digital and Compaq in 1986 for compatible hard drives and CD or DVD drives. The connection is used for storage devices such as hard disk drives, floppy disk drives, optical disc drives, and tape drives in computers.

Industry Standard Architecture (ISA) is the 16-bit internal bus of IBM PC/AT and similar computers based on the Intel 80286 and its immediate successors during the 1980s. The bus was (largely) backward compatible with the 8-bit bus of the 8088-based IBM PC, including the IBM PC/XT as well as IBM PC compatibles.
Small Computer System Interface is a set of standards for physically connecting and transferring data between computers and peripheral devices, best known for its use with storage devices such as hard disk drives. SCSI was introduced in the 1980s and has seen widespread use on servers and high-end workstations, with new SCSI standards being published as recently as SAS-4 in 2017.
Direct memory access (DMA) is a feature of computer systems that allows certain hardware subsystems to access main system memory independently of the central processing unit (CPU).
SATA is a computer bus interface that connects host bus adapters to mass storage devices such as hard disk drives, optical drives, and solid-state drives. Serial ATA succeeded the earlier Parallel ATA (PATA) standard to become the predominant interface for storage devices.

The Power Macintosh G3 is a series of personal computers designed, manufactured, and sold by Apple Computer from November 1997 to August 1999. It represented Apple's first step towards eliminating redundancy and complexity in the product line by replacing eight Power Macintosh models with three: Desktop and Mini Tower models for professional and home use, and an all-in-one model for education. The introduction of the Desktop and Mini Tower models coincided with Apple starting to sell build-to-order Macs directly from its web site in an online store, which was unusual for the time as Dell was the only major computer manufacturer doing this. Apple's move to build-to-order sales of the Power Macintosh G3 also coincided with the acquisition of Power Computing Corporation, which had been providing telephone sales of Macintosh clones for more than two years.

CompactFlash (CF) is a flash memory mass storage device used mainly in portable electronic devices. The format was specified and the devices were first manufactured by SanDisk in 1994.

In computer hardware a host controller, host adapter or host bus adapter (HBA) connects a computer system bus which acts as the host system to other network and storage devices. The terms are primarily used to refer to devices for connecting SCSI, SAS, NVMe, Fibre Channel and SATA devices. Devices for connecting to FireWire, USB and other devices may also be called host controllers or host adapters.
A disk array controller is a device that manages the physical disk drives and presents them to the computer as logical units. It often implements hardware RAID, thus it is sometimes referred to as RAID controller. It also often provides additional disk cache.
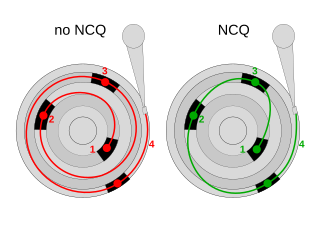
In computing, Native Command Queuing (NCQ) is an extension of the Serial ATA protocol allowing hard disk drives to internally optimize the order in which received read and write commands are executed. This can reduce the amount of unnecessary drive head movement, resulting in increased performance for workloads where multiple simultaneous read/write requests are outstanding, most often occurring in server-type applications.

In computing, Serial Attached SCSI (SAS) is a point-to-point serial protocol that moves data to and from computer-storage devices such as hard disk drives, solid-state drives and tape drives. SAS replaces the older Parallel SCSI bus technology that first appeared in the mid-1980s. SAS, like its predecessor, uses the standard SCSI command set. SAS offers optional compatibility with Serial ATA (SATA), versions 2 and later. This allows the connection of SATA drives to most SAS backplanes or controllers. The reverse, connecting SAS drives to SATA backplanes, is not possible.
BIOS implementations provide interrupts that can be invoked by operating systems and application programs to use the facilities of the firmware on IBM PC compatible computers. Traditionally, BIOS calls are mainly used by DOS programs and some other software such as boot loaders. BIOS runs in the real address mode of the x86 CPU, so programs that call BIOS either must also run in real mode or must switch from protected mode to real mode before calling BIOS and then switching back again. For this reason, modern operating systems that use the CPU in Protected mode or Long mode generally do not use the BIOS interrupt calls to support system functions, although they use the BIOS interrupt calls to probe and initialize hardware during booting. Real mode has the 1MB memory limitation, modern boot loaders use the unreal mode or protected mode to access up to 4GB memory.

The Western Digital Raptor is a discontinued series of high performance hard disk drives produced by Western Digital first marketed in 2003. The drive occupied a niche in the enthusiast, workstation and small-server market. Traditionally, the majority of servers used hard drives featuring a SCSI interface because of their advantages in both performance and reliability over consumer-level ATA drives.

Parallel SCSI is the earliest of the interface implementations in the SCSI family. SPI is a parallel bus; there is one set of electrical connections stretching from one end of the SCSI bus to the other. A SCSI device attaches to the bus but does not interrupt it. Both ends of the bus must be terminated.
In computer science, a command queue is a queue that determines when a command is executed, usually by order of priority or on a first-in first-out basis. Instead of waiting for each command to be executed before sending the next one, a program will put all its commands in the command queue, freeing it to perform other functions while the queue is processed by the operating system.
sync is a standard system call in the Unix operating system, which commits all data from the kernel filesystem buffers to non-volatile storage, i.e., data which has been scheduled for writing via low-level I/O system calls. Higher-level I/O layers such as stdio may maintain separate buffers of their own.

In computer storage, a disk buffer is the embedded memory in a hard disk drive (HDD) or solid-state drive (SSD) acting as a buffer between the rest of the computer and the physical hard disk platter or flash memory that is used for storage. Modern hard disk drives come with 8 to 256 MiB of such memory, and solid-state drives come with up to 4 GB of cache memory.
Spin-up refers to the process of a hard disk drive or optical disc drive accelerating its platters or inserted optical disc from a stopped state to an operational speed. The required operational speed depends on the design of the disk drive. Typical speeds of hard disks have been 2400, 3600, 4200, 5400, 7200, 10000 and 15000 revolutions per minute (RPM). Achieving such speeds can require a significant portion of the available power budget of a computer system, and so application of power to the disks must be carefully controlled. Operational speed of optical disc drives may vary depending on type of disc and mode of operation.

A storage area network (SAN) or storage network is a computer network which provides access to consolidated, block-level data storage. SANs are primarily used to access data storage devices, such as disk arrays and tape libraries from servers so that the devices appear to the operating system as direct-attached storage. A SAN typically is a dedicated network of storage devices not accessible through the local area network (LAN).
Hard disk drives are accessed over one of a number of bus types, including parallel ATA, Serial ATA (SATA), SCSI, Serial Attached SCSI (SAS), and Fibre Channel. Bridge circuitry is sometimes used to connect hard disk drives to buses with which they cannot communicate natively, such as IEEE 1394, USB, SCSI, NVMe and Thunderbolt.
References
- ↑ in the form of Parallel SCSI, Serial attached SCSI, and Fibre Channel drives
- 1 2 3 4 5 6 7 8 9 10 11 12 13 Dees, Brian (November–December 2005). "Native command queuing - advanced performance in desktop storage". IEEE Potentials. 24 (4): 4–7. doi:10.1109/MP.2005.1549750. S2CID 36264057.
- 1 2 3 4 5 6 "SCSI Architecture Model - 3 (SAM-3)" (PDF). Archived from the original (PDF) on 2012-03-17. Retrieved 2007-02-24.
- 1 2 "1532D: AT Attachment with Packet Interface - 7 Volume 1" (PDF). 1532D: AT Attachment with Packet Interface - 7. Archived from the original (PDF) on 2012-02-06. Retrieved 2007-01-02.