
Naval architecture, or naval engineering, is an engineering discipline incorporating elements of mechanical, electrical, electronic, software and safety engineering as applied to the engineering design process, shipbuilding, maintenance, and operation of marine vessels and structures. Naval architecture involves basic and applied research, design, development, design evaluation (classification) and calculations during all stages of the life of a marine vehicle. Preliminary design of the vessel, its detailed design, construction, trials, operation and maintenance, launching and dry-docking are the main activities involved. Ship design calculations are also required for ships being modified. Naval architecture also involves formulation of safety regulations and damage-control rules and the approval and certification of ship designs to meet statutory and non-statutory requirements.

The Norwegian Institute of Technology was a science institute in Trondheim, Norway. It was established in 1910, and existed as an independent technical university for 58 years, after which it was merged into the University of Trondheim as an independent college.

A remotely operated underwater vehicle (ROUV) or remotely operated vehicle (ROV) is a free-swimming submersible craft used to perform underwater observation, inspection and physical tasks such as valve operations, hydraulic functions and other general tasks within the subsea oil and gas industry, military, scientific and other applications. ROVs can also carry tooling packages for undertaking specific tasks such as pull-in and connection of flexible flowlines and umbilicals, and component replacement. They are often used to visit wrecks at great depths beyond the capacities of submersibles for research purposes, such as the Titanic, amongst others.

An autonomous underwater vehicle (AUV) is a robot that travels underwater without requiring continuous input from an operator. AUVs constitute part of a larger group of undersea systems known as unmanned underwater vehicles, a classification that includes non-autonomous remotely operated underwater vehicles (ROVs) – controlled and powered from the surface by an operator/pilot via an umbilical or using remote control. In military applications an AUV is more often referred to as an unmanned undersea vehicle (UUV). Underwater gliders are a subclass of AUVs.

An underwater glider is a type of autonomous underwater vehicle (AUV) that employs variable-buoyancy propulsion instead of traditional propellers or thrusters. It employs variable buoyancy in a similar way to a profiling float, but unlike a float, which can move only up and down, an underwater glider is fitted with hydrofoils that allow it to glide forward while descending through the water. At a certain depth, the glider switches to positive buoyancy to climb back up and forward, and the cycle is then repeated.

A mobile robot is an automatic machine that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering.
A navigation system is a computing system that aids in navigation. Navigation systems may be entirely on board the vehicle or vessel that the system is controlling or located elsewhere, making use of radio or other signal transmission to control the vehicle or vessel. In some cases, a combination of these methods is used.
A parametric array, in the field of acoustics, is a nonlinear transduction mechanism that generates narrow, nearly side lobe-free beams of low frequency sound, through the mixing and interaction of high frequency sound waves, effectively overcoming the diffraction limit associated with linear acoustics. The main side lobe-free beam of low frequency sound is created as a result of nonlinear mixing of two high frequency sound beams at their difference frequency. Parametric arrays can be formed in water, air, and earth materials/rock.

Kongsberg Maritime (KM) is a Norwegian technology enterprise within the Kongsberg Gruppen (KOG). Kongsberg Maritime deliver systems for positioning, surveying, navigation, and automation to merchant vessels and offshore installations. Their most well known products exist within dynamic positioning systems, marine automation and surveillance systems, process automation, satellite navigation, and hydroacoustics.
In fluid dynamics and elasticity, hydroelasticity or flexible fluid-structure interaction (FSI), is a branch of science which is concerned with the motion of deformable bodies through liquids. The theory of hydroelasticity has been adapted from aeroelasticity, to describe the effect of structural response of the body on the fluid around it.
GPS/INS is the use of GPS satellite signals to correct or calibrate a solution from an inertial navigation system (INS). The method is applicable for any GNSS/INS system.
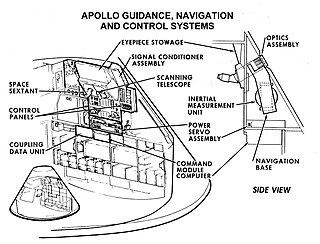
Guidance, navigation and control is a branch of engineering dealing with the design of systems to control the movement of vehicles, especially, automobiles, ships, aircraft, and spacecraft. In many cases these functions can be performed by trained humans. However, because of the speed of, for example, a rocket's dynamics, human reaction time is too slow to control this movement. Therefore, systems—now almost exclusively digital electronic—are used for such control. Even in cases where humans can perform these functions, it is often the case that GNC systems provide benefits such as alleviating operator work load, smoothing turbulence, fuel savings, etc. In addition, sophisticated applications of GNC enable automatic or remote control.

Miroslav Krstić is an American control theorist and Distinguished Professor of Mechanical and Aerospace Engineering at the University of California, San Diego (UCSD). Krstić is also the director of the Center for Control Systems and Dynamics at UCSD and a Senior Associate Vice Chancellor for Research. In the list of eminent researchers in systems and control, he is the youngest.

Odd Magnus Faltinsen is a Norwegian mathematician and professor of marine technology.
Underwater computer vision is a subfield of computer vision. In recent years, with the development of underwater vehicles, the need to be able to record and process huge amounts of information has become increasingly important. Applications range from inspection of underwater structures for the offshore industry to the identification and counting of fishes for biological research. However, no matter how big the impact of this technology can be to industry and research, it still is in a very early stage of development compared to traditional computer vision. One reason for this is that, the moment the camera goes into the water, a whole new set of challenges appear. On one hand, cameras have to be made waterproof, marine corrosion deteriorates materials quickly and access and modifications to experimental setups are costly, both in time and resources. On the other hand, the physical properties of the water make light behave differently, changing the appearance of a same object with variations of depth, organic material, currents, temperature etc.

María Marta Molinas Cabrera is a Paraguayan electrical engineer, educated in Japan, who works in Norway as a professor of engineering cybernetics at the Norwegian University of Science and Technology (NTNU).
Kristin Ytterstad Pettersen is a Norwegian engineer whose research involves nonlinear control theory and its application to controlling the motion of both watercraft and snakebots. She is a professor of engineering cybernetics at the Norwegian University of Science and Technology, and the founder of Eelume AS.

Håvard Fjær Grip is a Norwegian cybernetics engineer and robotics technologist. He was the chief pilot of NASA's Jet Propulsion Laboratory's Mars helicopter, Ingenuity, and led the development of its aerodynamics and flight control system. Grip successfully flew Ingenuity's first flight on Mars on April 19, 2021, which made history as the first extraterrestrial helicopter flight. As of October 2023, he is chief engineer of the Mars Sample Recovery Helicopters, part of the NASA-ESA Mars Sample Return campaign.

Duane Torrance "Mac" McRuer was a scientist, engineer, and expert in aircraft flight and other vehicle controls who cofounded Systems Technology Inc. in 1957. He made many contributions to the theory and practical application of human-machine interaction and control.
Fossen's marine craft model provides a mathematical framework for describing the nonlinear motion of marine craft in a compact matrix-vector form. Thor I. Fossen first introduced these equations of motion in his 1991 doctoral thesis, marking a significant advancement over classical hydrodynamic models, traditionally expressed in component form. These earlier models often involved hundreds of elements, making it challenging to exploit inherent system properties such as symmetry and energy conservation. Fossen's work unified these dynamics into a streamlined representation, enabling more effective analysis and design. This approach has since become a cornerstone in the field of marine craft hydrodynamics and motion control, widely adopted in both academic research and industry applications.
