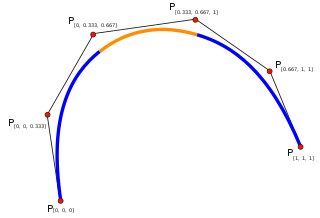
In the mathematical subfield of numerical analysis, a B-spline, or basis spline, is a spline function that has minimal support with respect to a given degree, smoothness, and domain partition. Any spline function of given degree can be expressed as a linear combination of B-splines of that degree. Cardinal B-splines have knots that are equidistant from each other. B-splines can be used for curve-fitting and numerical differentiation of experimental data.

The surface area of a solid object is a measure of the total area that the surface of the object occupies. The mathematical definition of surface area in the presence of curved surfaces is considerably more involved than the definition of arc length of one-dimensional curves, or of the surface area for polyhedra, for which the surface area is the sum of the areas of its faces. Smooth surfaces, such as a sphere, are assigned surface area using their representation as parametric surfaces. This definition of surface area is based on methods of infinitesimal calculus and involves partial derivatives and double integration.
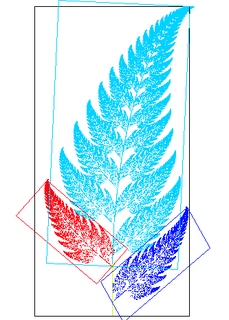
In geometry, an affine transformation, affine map or an affinity is a function between affine spaces which preserves points, straight lines and planes. Also, sets of parallel lines remain parallel after an affine transformation. An affine transformation does not necessarily preserve angles between lines or distances between points, though it does preserve ratios of distances between points lying on a straight line.
Unit quaternions, also known as versors, provide a convenient mathematical notation for representing orientations and rotations of objects in three dimensions. Compared to Euler angles they are simpler to compose and avoid the problem of gimbal lock. Compared to rotation matrices they are more compact, more numerically stable, and more efficient. Quaternions have applications in computer graphics, computer vision, robotics, navigation, molecular dynamics, flight dynamics, orbital mechanics of satellites and crystallographic texture analysis.
In numerical analysis, polynomial interpolation is the interpolation of a given data set by the polynomial of lowest possible degree that passes through the points of the dataset.
In Mathematics and Statistics, a piecewise linear or segmented function is a real-valued function defined on the real numbers or a segment thereof, whose graph is composed of straight-line sections. It is a piecewise-defined function, each of whose pieces is an affine function.
In mathematics, a spline is a function defined piecewise by polynomials. In interpolating problems, spline interpolation is often preferred to polynomial interpolation because it yields similar results, even when using low degree polynomials, while avoiding Runge's phenomenon for higher degrees.
Curve fitting is the process of constructing a curve, or mathematical function, that has the best fit to a series of data points, possibly subject to constraints. Curve fitting can involve either interpolation, where an exact fit to the data is required, or smoothing, in which a "smooth" function is constructed that approximately fits the data. A related topic is regression analysis, which focuses more on questions of statistical inference such as how much uncertainty is present in a curve that is fit to data observed with random errors. Fitted curves can be used as an aid for data visualization, to infer values of a function where no data are available, and to summarize the relationships among two or more variables. Extrapolation refers to the use of a fitted curve beyond the range of the observed data, and is subject to a degree of uncertainty since it may reflect the method used to construct the curve as much as it reflects the observed data.
The particle-in-cell (PIC) method refers to a technique used to solve a certain class of partial differential equations. In this method, individual particles in a Lagrangian frame are tracked in continuous phase space, whereas moments of the distribution such as densities and currents are computed simultaneously on Eulerian (stationary) mesh points.
In numerical analysis, a cubic Hermite spline or cubic Hermite interpolator is a spline where each piece is a third-degree polynomial specified in Hermite form: i.e., by its values and first derivatives at the end points of the corresponding domain interval.
A parallel of a curve is the
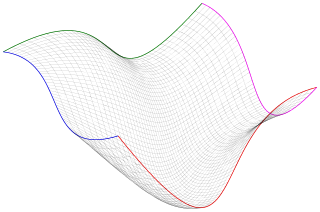
A parametric surface is a surface in the Euclidean space which is defined by a parametric equation with two parameters Parametric representation is a very general way to specify a surface, as well as implicit representation. Surfaces that occur in two of the main theorems of vector calculus, Stokes' theorem and the divergence theorem, are frequently given in a parametric form. The curvature and arc length of curves on the surface, surface area, differential geometric invariants such as the first and second fundamental forms, Gaussian, mean, and principal curvatures can all be computed from a given parametrization.
Lattice Boltzmann methods (LBM) is a class of computational fluid dynamics (CFD) methods for fluid simulation. Instead of solving the Navier–Stokes equations, the discrete Boltzmann equation is solved to simulate the flow of a Newtonian fluid with collision models such as Bhatnagar–Gross–Krook (BGK). By simulating streaming and collision processes across a limited number of particles, the intrinsic particle interactions evince a microcosm of viscous flow behavior applicable across the greater mass.
In mathematics of stochastic systems, the Runge–Kutta method is a technique for the approximate numerical solution of a stochastic differential equation. It is a generalisation of the Runge–Kutta method for ordinary differential equations to stochastic differential equations (SDEs). Importantly, the method does not involve knowing derivatives of the coefficient functions in the SDEs.

Active contour model, also called snakes, is a framework in computer vision introduced by Michael Kass, Andrew Witkin and Demetri Terzopoulos for delineating an object outline from a possibly noisy 2D image. The snakes model is popular in computer vision, and snakes are widely used in applications like object tracking, shape recognition, segmentation, edge detection and stereo matching.
In numerical linear algebra, the Alternating Direction Implicit (ADI) method is an iterative method used to solve Sylvester matrix equations. It is a popular method for solving the large matrix equations that arise in systems theory and control, and can be formulated to construct solutions in a memory-efficient, factored form. It is also used to numerically solve parabolic and elliptic partial differential equations, and is a classic method used for modeling heat conduction and solving the diffusion equation in two or more dimensions. It is an example of an operator splitting method.
In kinematics, the motion of a rigid body is defined as a continuous set of displacements. One-parameter motions can be defined as a continuous displacement of moving object with respect to a fixed frame in Euclidean three-space (E3), where the displacement depends on one parameter, mostly identified as time.
In fluid mechanics, meteorology and oceanography, a trajectory traces the motion of a single point, often called a parcel, in the flow.

In geology, numerical modeling is a widely applied technique to tackle complex geological problems by computational simulation of geological scenarios.