Trilinear interpolation is the extension of linear interpolation, which operates in spaces with dimension, and bilinear interpolation, which operates with dimension , to dimension . These interpolation schemes all use polynomials of order 1, giving an accuracy of order 2, and it requires adjacent pre-defined values surrounding the interpolation point. There are several ways to arrive at trilinear interpolation, which is equivalent to 3-dimensional tensorB-spline interpolation of order 1, and the trilinear interpolation operator is also a tensor product of 3 linear interpolation operators.
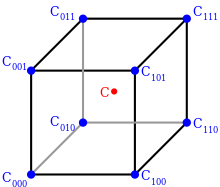
Eight corner points on a cube surrounding the interpolation point C
On a periodic and cubic lattice, let , , and be the differences between each of , , and the smaller coordinate related, that is:
where indicates the lattice point below , and indicates the lattice point above and similarly for and .
First one interpolates along (imagine one is "pushing" the face of the cube defined by to the opposing face, defined by ), giving:
Where means the function value of Then one interpolates these values (along , "pushing" from to ), giving:
Finally one interpolates these values along (walking through a line):
This gives us a predicted value for the point.
The result of trilinear interpolation is independent of the order of the interpolation steps along the three axes: any other order, for instance along , then along , and finally along , produces the same value.
Algorithm visualization
A geometric visualisation of trilinear interpolation. The product of the value at the desired point and the entire volume is equal to the sum of the products of the value at each corner and the partial volume diagonally opposite the corner.
The above operations can be visualized as follows: First we find the eight corners of a cube that surround our point of interest. These corners have the values , , , , , , , .
Next, we perform linear interpolation between and to find , and to find , and to find , and to find .
Now we do interpolation between and to find , and to find . Finally, we calculate the value via linear interpolation of and
In practice, a trilinear interpolation is identical to two bilinear interpolation combined with a linear interpolation:
Alternative algorithm
An alternative way to write the solution to the interpolation problem is
where the coefficients are found by solving the linear system
pseudo-code from NASA, describes an iterative inverse trilinear interpolation (given the vertices and the value of C find Xd, Yd and Zd).
Paul Bourke, Interpolation methods, 1999. Contains a very clever and simple method to find trilinear interpolation that is based on binary logic and can be extended to any dimension (Tetralinear, Pentalinear, ...).
Kenwright, Free-Form Tetrahedron Deformation. International Symposium on Visual Computing. Springer International Publishing, 2015 .
Related Research Articles
In information theory and coding theory, Reed–Solomon codes are a group of error-correcting codes that were introduced by Irving S. Reed and Gustave Solomon in 1960. They have many applications, including consumer technologies such as MiniDiscs, CDs, DVDs, Blu-ray discs, QR codes, Data Matrix, data transmission technologies such as DSL and WiMAX, broadcast systems such as satellite communications, DVB and ATSC, and storage systems such as RAID 6.
In probability theory and statistics, the multivariate normal distribution, multivariate Gaussian distribution, or joint normal distribution is a generalization of the one-dimensional (univariate) normal distribution to higher dimensions. One definition is that a random vector is said to be k-variate normally distributed if every linear combination of its k components has a univariate normal distribution. Its importance derives mainly from the multivariate central limit theorem. The multivariate normal distribution is often used to describe, at least approximately, any set of (possibly) correlated real-valued random variables, each of which clusters around a mean value.
Kinematics is a subfield of physics and mathematics, developed in classical mechanics, that describes the motion of points, bodies (objects), and systems of bodies without considering the forces that cause them to move. Kinematics, as a field of study, is often referred to as the "geometry of motion" and is occasionally seen as a branch of both applied and pure mathematics since it can be studied without considering the mass of a body or the forces acting upon it. A kinematics problem begins by describing the geometry of the system and declaring the initial conditions of any known values of position, velocity and/or acceleration of points within the system. Then, using arguments from geometry, the position, velocity and acceleration of any unknown parts of the system can be determined. The study of how forces act on bodies falls within kinetics, not kinematics. For further details, see analytical dynamics.
In mathematics, linear interpolation is a method of curve fitting using linear polynomials to construct new data points within the range of a discrete set of known data points.
In geometry, the incircle or inscribed circle of a triangle is the largest circle that can be contained in the triangle; it touches the three sides. The center of the incircle is a triangle center called the triangle's incenter.
In numerical analysis, polynomial interpolation is the interpolation of a given bivariate data set by the polynomial of lowest possible degree that passes through the points of the dataset.
In materials science and solid mechanics, Poisson's ratio is a measure of the Poisson effect, the deformation of a material in directions perpendicular to the specific direction of loading. The value of Poisson's ratio is the negative of the ratio of transverse strain to axial strain. For small values of these changes, ν is the amount of transversal elongation divided by the amount of axial compression. Most materials have Poisson's ratio values ranging between 0.0 and 0.5. For soft materials, such as rubber, where the bulk modulus is much higher than the shear modulus, Poisson's ratio is near 0.5. For open-cell polymer foams, Poisson's ratio is near zero, since the cells tend to collapse in compression. Many typical solids have Poisson's ratios in the range of 0.2 to 0.3. The ratio is named after the French mathematician and physicist Siméon Poisson.
In geodesy, conversion among different geographic coordinate systems is made necessary by the different geographic coordinate systems in use across the world and over time. Coordinate conversion is composed of a number of different types of conversion: format change of geographic coordinates, conversion of coordinate systems, or transformation to different geodetic datums. Geographic coordinate conversion has applications in cartography, surveying, navigation and geographic information systems.
In mathematics, a spline is a function defined piecewise by polynomials. In interpolating problems, spline interpolation is often preferred to polynomial interpolation because it yields similar results, even when using low degree polynomials, while avoiding Runge's phenomenon for higher degrees.
In mathematics, the matrix exponential is a matrix function on square matrices analogous to the ordinary exponential function. It is used to solve systems of linear differential equations. In the theory of Lie groups, the matrix exponential gives the exponential map between a matrix Lie algebra and the corresponding Lie group.
In mathematics, bilinear interpolation is a method for interpolating functions of two variables using repeated linear interpolation. It is usually applied to functions sampled on a 2D rectilinear grid, though it can be generalized to functions defined on the vertices of arbitrary convex quadrilaterals.
In geometry, a barycentric coordinate system is a coordinate system in which the location of a point is specified by reference to a simplex. The barycentric coordinates of a point can be interpreted as masses placed at the vertices of the simplex, such that the point is the center of mass of these masses. These masses can be zero or negative; they are all positive if and only if the point is inside the simplex.
sRGB is a standard numerical encoding of colors, based on the RGB color space, for use on monitors, printers, and the World Wide Web. It was initially proposed by HP and Microsoft in 1996 and became an official standard of the International Electrotechnical Commission (IEC) as IEC 61966-2-1:1999. It is the current defined standard colorspace for the web, and it is usually the assumed colorspace for images that are neither tagged for a colorspace nor have an embedded color profile.
In geometry, the circumscribed circle or circumcircle of a triangle is a circle that passes through all three vertices. The center of this circle is called the circumcenter of the triangle, and its radius is called the circumradius. The circumcenter is the point of intersection between the three perpendicular bisectors of the triangle's sides, and is a triangle center.
In 1931 the International Commission on Illumination (CIE) published the CIE 1931 color spaces which define the relationship between the visible spectrum and the visual sensation of specific colors by human color vision. The CIE color spaces are mathematical models that create a "standard observer", which attempts to predict the perception of unique hues of color. These color spaces are essential tools that provide the foundation for measuring color for industry, including inks, dyes, and paints, illumination, color imaging, etc. The CIE color spaces contributed to the development of color television, the creation of instruments for maintaining consistent color in manufacturing processes, and other methods of color management.
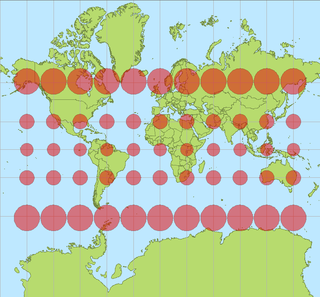
In cartography, a Tissot's indicatrix is a mathematical contrivance presented by French mathematician Nicolas Auguste Tissot in 1859 and 1871 in order to characterize local distortions due to map projection. It is the geometry that results from projecting a circle of infinitesimal radius from a curved geometric model, such as a globe, onto a map. Tissot proved that the resulting diagram is an ellipse whose axes indicate the two principal directions along which scale is maximal and minimal at that point on the map.
In quantum computing, a graph state is a special type of multi-qubit state that can be represented by a graph. Each qubit is represented by a vertex of the graph, and there is an edge between every interacting pair of qubits. In particular, they are a convenient way of representing certain types of entangled states.
In mathematics, and in particular, algebra, a generalized inverse of an element x is an element y that has some properties of an inverse element but not necessarily all of them. The purpose of constructing a generalized inverse of a matrix is to obtain a matrix that can serve as an inverse in some sense for a wider class of matrices than invertible matrices. Generalized inverses can be defined in any mathematical structure that involves associative multiplication, that is, in a semigroup. This article describes generalized inverses of a matrix .
In computational complexity theory and quantum computing, Simon's problem is a computational problem that is proven to be solved exponentially faster on a quantum computer than on a classical computer. The quantum algorithm solving Simon's problem, usually called Simon's algorithm, served as the inspiration for Shor's algorithm. Both problems are special cases of the abelian hidden subgroup problem, which is now known to have efficient quantum algorithms.
Zhegalkinpolynomials, also known as algebraic normal form, are a representation of functions in Boolean algebra. Introduced by the Russian mathematician Ivan Ivanovich Zhegalkin in 1927, they are the polynomial ring over the integers modulo 2. The resulting degeneracies of modular arithmetic result in Zhegalkin polynomials being simpler than ordinary polynomials, requiring neither coefficients nor exponents. Coefficients are redundant because 1 is the only nonzero coefficient. Exponents are redundant because in arithmetic mod 2, x2 = x. Hence a polynomial such as 3x2y5z is congruent to, and can therefore be rewritten as, xyz.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.