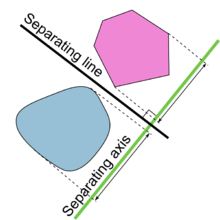
Hyperplane separation theorem [4] — Let  and
and  be two disjoint nonempty convex subsets of
be two disjoint nonempty convex subsets of  . Then there exist a nonzero vector
. Then there exist a nonzero vector  and a real number
and a real number  such that
such that

for all  in and
in and  in ; i.e., the hyperplane
in ; i.e., the hyperplane  , the normal vector, separates and .
, the normal vector, separates and .
If both sets are closed, and at least one of them is compact, then the separation can be strict, that is,  for some
for some 
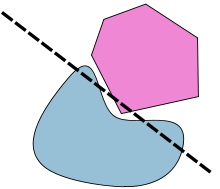
The number of dimensions must be finite. In infinite-dimensional spaces there are examples of two closed, convex, disjoint sets which cannot be separated by a closed hyperplane (a hyperplane where a continuous linear functional equals some constant) even in the weak sense where the inequalities are not strict. [5]
Here, the compactness in the hypothesis cannot be relaxed; see an example in the section Counterexamples and uniqueness. This version of the separation theorem does generalize to infinite-dimension; the generalization is more commonly known as the Hahn–Banach separation theorem.
Proof of theoremWe first prove the second case. (See the diagram.)
WLOG, is compact. By the lemma, there exist points  and
and  of minimum distance to each other. Since and are disjoint, we have
of minimum distance to each other. Since and are disjoint, we have  . Now, construct two hyperplanes
. Now, construct two hyperplanes  perpendicular to line segment
perpendicular to line segment  , with
, with  across
across  and
and  across
across  . We claim that neither nor enters the space between , and thus the perpendicular hyperplanes to
. We claim that neither nor enters the space between , and thus the perpendicular hyperplanes to  satisfy the requirement of the theorem.
satisfy the requirement of the theorem.
Algebraically, the hyperplanes are defined by the vector  , and two constants
, and two constants  , such that
, such that  . Our claim is that
. Our claim is that  and
and  .
.
Suppose there is some  such that
such that  , then let
, then let  be the foot of perpendicular from to the line segment
be the foot of perpendicular from to the line segment  . Since is convex, is inside , and by planar geometry, is closer to than , contradiction. Similar argument applies to .
. Since is convex, is inside , and by planar geometry, is closer to than , contradiction. Similar argument applies to .
Now for the first case.
Approach both  from the inside by
from the inside by  and
and  , such that each
, such that each  is closed and compact, and the unions are the relative interiors
is closed and compact, and the unions are the relative interiors  . (See relative interior page for details.)
. (See relative interior page for details.)
Now by the second case, for each pair there exists some unit vector  and real number
and real number  , such that
, such that  .
.
Since the unit sphere is compact, we can take a convergent subsequence, so that  . Let
. Let  . We claim that
. We claim that  , thus separating .
, thus separating .
Assume not, then there exists some  such that
such that  , then since , for large enough
, then since , for large enough  , we have
, we have  , contradiction.
, contradiction.
Since a separating hyperplane cannot intersect the interiors of open convex sets, we have a corollary: