
In geometry, the convex hull or convex envelope or convex closure of a shape is the smallest convex set that contains it. The convex hull may be defined either as the intersection of all convex sets containing a given subset of a Euclidean space, or equivalently as the set of all convex combinations of points in the subset. For a bounded subset of the plane, the convex hull may be visualized as the shape enclosed by a rubber band stretched around the subset.
Discrete geometry and combinatorial geometry are branches of geometry that study combinatorial properties and constructive methods of discrete geometric objects. Most questions in discrete geometry involve finite or discrete sets of basic geometric objects, such as points, lines, planes, circles, spheres, polygons, and so forth. The subject focuses on the combinatorial properties of these objects, such as how they intersect one another, or how they may be arranged to cover a larger object.

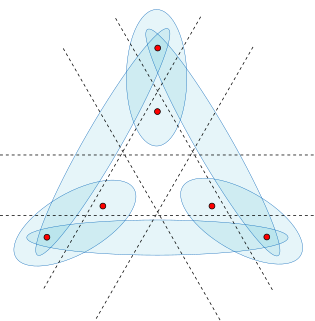
The Sylvester–Gallai theorem in geometry states that every finite set of points in the Euclidean plane has a line that passes through exactly two of the points or a line that passes through all of them. It is named after James Joseph Sylvester, who posed it as a problem in 1893, and Tibor Gallai, who published one of the first proofs of this theorem in 1944.

A triangulation of a set of points in the Euclidean space is a simplicial complex that covers the convex hull of , and whose vertices belong to . In the plane, triangulations are made up of triangles, together with their edges and vertices. Some authors require that all the points of are vertices of its triangulations. In this case, a triangulation of a set of points in the plane can alternatively be defined as a maximal set of non-crossing edges between points of . In the plane, triangulations are special cases of planar straight-line graphs.
In geometry, a triangulation is a subdivision of a planar object into triangles, and by extension the subdivision of a higher-dimension geometric object into simplices. Triangulations of a three-dimensional volume would involve subdividing it into tetrahedra packed together.
The art gallery problem or museum problem is a well-studied visibility problem in computational geometry. It originates from a real-world problem of guarding an art gallery with the minimum number of guards who together can observe the whole gallery. In the geometric version of the problem, the layout of the art gallery is represented by a simple polygon and each guard is represented by a point in the polygon. A set of points is said to guard a polygon if, for every point in the polygon, there is some such that the line segment between and does not leave the polygon.

A convex polytope is a special case of a polytope, having the additional property that it is also a convex set contained in the -dimensional Euclidean space . Most texts use the term "polytope" for a bounded convex polytope, and the word "polyhedron" for the more general, possibly unbounded object. Others allow polytopes to be unbounded. The terms "bounded/unbounded convex polytope" will be used below whenever the boundedness is critical to the discussed issue. Yet other texts identify a convex polytope with its boundary.

The "happy ending problem" is the following statement:

Geometric graph theory in the broader sense is a large and amorphous subfield of graph theory, concerned with graphs defined by geometric means. In a stricter sense, geometric graph theory studies combinatorial and geometric properties of geometric graphs, meaning graphs drawn in the Euclidean plane with possibly intersecting straight-line edges, and topological graphs, where the edges are allowed to be arbitrary continuous curves connecting the vertices, thus it is "the theory of geometric and topological graphs".
In discrete geometry, a k-set of a finite point set S in the Euclidean plane is a subset of k elements of S that can be strictly separated from the remaining points by a line. More generally, in Euclidean space of higher dimensions, a k-set of a finite point set is a subset of k elements that can be separated from the remaining points by a hyperplane. In particular, when k = n/2, the line or hyperplane that separates a k-set from the rest of S is a halving line or halving plane.

In Euclidean plane geometry, a pseudotriangle (pseudo-triangle) is the simply connected subset of the plane that lies between any three mutually tangent convex sets. A pseudotriangulation (pseudo-triangulations) is a partition of a region of the plane into pseudotriangles, and a pointed pseudotriangulation is a pseudotriangulation in which at each vertex the incident edges span an angle of less than π.

Kenneth Lee Clarkson is an American computer scientist known for his research in computational geometry. He is a researcher at the IBM Almaden Research Center, and co-editor-in-chief of the Journal of Computational Geometry.
In computational geometry and computer science, the minimum-weight triangulation problem is the problem of finding a triangulation of minimal total edge length. That is, an input polygon or the convex hull of an input point set must be subdivided into triangles that meet edge-to-edge and vertex-to-vertex, in such a way as to minimize the sum of the perimeters of the triangles. The problem is NP-hard for point set inputs, but may be approximated to any desired degree of accuracy. For polygon inputs, it may be solved exactly in polynomial time. The minimum weight triangulation has also sometimes been called the optimal triangulation.
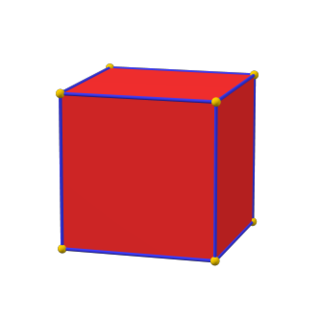
In geometry and polyhedral combinatorics, an integral polytope is a convex polytope whose vertices all have integer Cartesian coordinates. That is, it is a polytope that equals the convex hull of its integer points. Integral polytopes may also be called convex lattice polytopes or Z-polytopes. The special cases of two- and three-dimensional integral polytopes may be called polygons or polyhedra instead of polytopes, respectively.
In geometry, the moment curve is an algebraic curve in d-dimensional Euclidean space given by the set of points with Cartesian coordinates of the form
In the study of algorithms, an LP-type problem is an optimization problem that shares certain properties with low-dimensional linear programs and that may be solved by similar algorithms. LP-type problems include many important optimization problems that are not themselves linear programs, such as the problem of finding the smallest circle containing a given set of planar points. They may be solved by a combination of randomized algorithms in an amount of time that is linear in the number of elements defining the problem, and subexponential in the dimension of the problem.
The McMullen problem is an open problem in discrete geometry named after Peter McMullen.
In mathematics, a topological graph is a representation of a graph in the plane, where the vertices of the graph are represented by distinct points and the edges by Jordan arcs joining the corresponding pairs of points. The points representing the vertices of a graph and the arcs representing its edges are called the vertices and the edges of the topological graph. It is usually assumed that any two edges of a topological graph cross a finite number of times, no edge passes through a vertex different from its endpoints, and no two edges touch each other (without crossing). A topological graph is also called a drawing of a graph.

A flip graph is a graph whose vertices are combinatorial or geometric objects, and whose edges link two of these objects when they can be obtained from one another by an elementary operation called a flip. Flip graphs are special cases of geometric graphs.

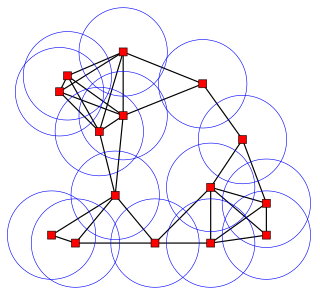
In geometric graph theory, a penny graph is a contact graph of unit circles. That is, it is an undirected graph whose vertices can be represented by unit circles, with no two of these circles crossing each other, and with two adjacent vertices if and only if they are represented by tangent circles. More simply, they are the graphs formed by arranging pennies in a non-overlapping way on a flat surface, making a vertex for each penny, and making an edge for each two pennies that touch.




