Computer vision tasks include methods for acquiring, processing, analyzing and understanding digital images, and extraction of high-dimensional data from the real world in order to produce numerical or symbolic information, e.g. in the forms of decisions. Understanding in this context means the transformation of visual images into descriptions of the world that make sense to thought processes and can elicit appropriate action. This image understanding can be seen as the disentangling of symbolic information from image data using models constructed with the aid of geometry, physics, statistics, and learning theory.

A humanoid robot is a robot resembling the human body in shape. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some humanoid robots may replicate only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.
Domo is an experimental robot made by MIT designed to interact with humans. The brainchild of Jeff Weber and Aaron Edsinger, cofounders of Meka Robotics, its name comes from the Japanese phrase for "thank you very much", domo arigato, as well as the Styx song, "Mr. Roboto". The Domo project was originally funded by NASA, and has now been joined by Toyota in funding robot's development.
An entertainment robot is, as the name indicates, a robot that is not made for utilitarian use, as in production or domestic services, but for the sole subjective pleasure of the human. It serves, usually the owner or his housemates, guests or clients. Robotics technologies are applied in many areas of culture and entertainment.
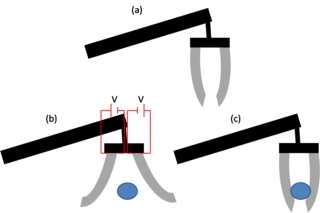
An electroactive polymer (EAP) is a polymer that exhibits a change in size or shape when stimulated by an electric field. The most common applications of this type of material are in actuators and sensors. A typical characteristic property of an EAP is that they will undergo a large amount of deformation while sustaining large forces.
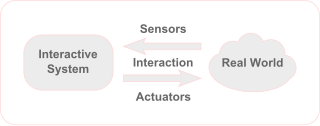
Physical computing involves interactive systems that can sense and respond to the world around them. While this definition is broad enough to encompass systems such as smart automotive traffic control systems or factory automation processes, it is not commonly used to describe them. In a broader sense, physical computing is a creative framework for understanding human beings' relationship to the digital world. In practical use, the term most often describes handmade art, design or DIY hobby projects that use sensors and microcontrollers to translate analog input to a software system, and/or control electro-mechanical devices such as motors, servos, lighting or other hardware.

A mobile robot is an automatic machine that is capable of locomotion. Mobile robotics is usually considered to be a subfield of robotics and information engineering.

BigDog is a dynamically stable quadruped military robot that was created in 2005 by Boston Dynamics with Foster-Miller, the NASA Jet Propulsion Laboratory, and the Harvard University Concord Field Station. It was funded by DARPA, but the project was shelved after the BigDog was deemed too loud for combat.
Modular self-reconfiguring robotic systems or self-reconfigurable modular robots are autonomous kinematic machines with variable morphology. Beyond conventional actuation, sensing and control typically found in fixed-morphology robots, self-reconfiguring robots are also able to deliberately change their own shape by rearranging the connectivity of their parts, in order to adapt to new circumstances, perform new tasks, or recover from damage.
Responsive architecture is an evolving field of architectural practice and research. Responsive architectures are those that measure actual environmental conditions to enable buildings to adapt their form, shape, color or character responsively.
Recent innovations in mobile and sensor technologies allow for creating a digital representation of almost any physical entity and its parameters over time at any place. RFID technologies, for instance, are used to ground digital representations, which are used to track and geo-reference physical entities. In general, physical worlds and digital representations become tightly interconnected, so that manipulations in either would have effect on the other.

In home automation systems and robotics, a flower robot is a simple electromechanical device with the appearance of a common flower, with components such as stem and leaves. First developed by Berufsbildende Schule 1 Kaiserslautern in 2006 and later by Carnegie Mellon University in 2007, flower robots are used as intelligent home appliances, with capabilities such as sensing, simple actuation for movements, and effectors such as lights or humidifier.

Robotics is the branch of technology that deals with the design, construction, operation, structural disposition, manufacture and application of robots. Robotics is related to the sciences of electronics, engineering, mechanics, and software.

Robotics is an interdisciplinary branch of computer science and engineering. Robotics involves the design, construction, operation, and use of robots. The goal of robotics is to design machines that can help and assist humans. Robotics integrates fields of mechanical engineering, electrical engineering, information engineering, mechatronics engineering, electronics, biomedical engineering, computer engineering, control systems engineering, software engineering, mathematics, etc.
The following outline is provided as an overview of and topical guide to robotics:
Robotic materials are composite materials that combine sensing, actuation, computation, and communication in a repeatable or amorphous pattern. Robotic materials can be considered computational metamaterials in that they extend the original definition of a metamaterial as "macroscopic composites having a man-made, three-dimensional, periodic cellular architecture designed to produce an optimized combination, not available in nature, of two or more responses to specific excitation" by being fully programmable. That is, unlike in a conventional metamaterial, the relationship between a specific excitation and response is governed by sensing, actuation, and a computer program that implements the desired logic.

Soft robotics is a subfield of robotics that concerns the design, control, and fabrication of robots composed of compliant materials, instead of rigid links. In contrast to rigid-bodied robots built from metals, ceramics and hard plastics, the compliance of soft robots can improve their safety when working in close contact with humans.

Self-tying shoes are designed to automatically tighten once the user puts them on. Such types of "smart shoes" were initially depicted in the 1989 science fiction film Back to the Future Part II.
Responsive computer-aided design is an approach to computer-aided design (CAD) that utilizes real-world sensors and data to modify a three-dimensional (3D) computer model. The concept is related to cyber-physical systems through blurring of the virtual and physical worlds, however, applies specifically to the initial digital design of an object prior to production.
A continuum robot is a type of robot that is characterised by infinite degrees of freedom and number of joints. These characteristics allow continuum manipulators to adjust and modify their shape at any point along their length, granting them the possibility to work in confined spaces and complex environments where standard rigid-link robots cannot operate. In particular, we can define a continuum robot as an actuatable structure whose constitutive material forms curves with continuous tangent vectors. This is a fundamental definition that allows to distinguish between continuum robots and snake-arm robots or hyper-redundant manipulators: the presence of rigid links and joints allows them to only approximately perform curves with continuous tangent vectors.