Related Research Articles

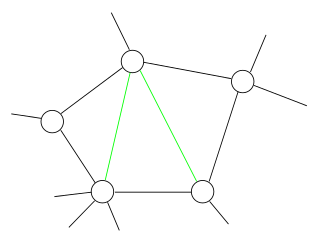
A minimum spanning tree (MST) or minimum weight spanning tree is a subset of the edges of a connected, edge-weighted undirected graph that connects all the vertices together, without any cycles and with the minimum possible total edge weight. That is, it is a spanning tree whose sum of edge weights is as small as possible. More generally, any edge-weighted undirected graph has a minimum spanning forest, which is a union of the minimum spanning trees for its connected components.

Dijkstra's algorithm is an algorithm for finding the shortest paths between nodes in a graph, which may represent, for example, road networks. It was conceived by computer scientist Edsger W. Dijkstra in 1956 and published three years later.

In the mathematical theory of directed graphs, a graph is said to be strongly connected if every vertex is reachable from every other vertex. The strongly connected components of an arbitrary directed graph form a partition into subgraphs that are themselves strongly connected. It is possible to test the strong connectivity of a graph, or to find its strongly connected components, in linear time (that is, Θ(V + E)).
In the mathematical area of graph theory, a chordal graph is one in which all cycles of four or more vertices have a chord, which is an edge that is not part of the cycle but connects two vertices of the cycle. Equivalently, every induced cycle in the graph should have exactly three vertices. The chordal graphs may also be characterized as the graphs that have perfect elimination orderings, as the graphs in which each minimal separator is a clique, and as the intersection graphs of subtrees of a tree. They are sometimes also called rigid circuit graphs or triangulated graphs.
In graph theory, a bridge, isthmus, cut-edge, or cut arc is an edge of a graph whose deletion increases the graph's number of connected components. Equivalently, an edge is a bridge if and only if it is not contained in any cycle. For a connected graph, a bridge can uniquely determine a cut. A graph is said to be bridgeless or isthmus-free if it contains no bridges.
In graph theory, the treewidth of an undirected graph is an integer number which specifies, informally, how far the graph is from being a tree. The smallest treewidth is 1; the graphs with treewidth 1 are exactly the trees and the forests. The graphs with treewidth at most 2 are the series–parallel graphs. The maximal graphs with treewidth exactly k are called k-trees, and the graphs with treewidth at most k are called partial k-trees. Many other well-studied graph families also have bounded treewidth.
In graph theory, a path decomposition of a graph G is, informally, a representation of G as a "thickened" path graph, and the pathwidth of G is a number that measures how much the path was thickened to form G. More formally, a path-decomposition is a sequence of subsets of vertices of G such that the endpoints of each edge appear in one of the subsets and such that each vertex appears in a contiguous subsequence of the subsets, and the pathwidth is one less than the size of the largest set in such a decomposition. Pathwidth is also known as interval thickness, vertex separation number, or node searching number.
In graph theory and computer science, the lowest common ancestor (LCA) of two nodes v and w in a tree or directed acyclic graph (DAG) T is the lowest node that has both v and w as descendants, where we define each node to be a descendant of itself.
A link/cut tree is a data structure for representing a forest, a set of rooted trees, and offers the following operations:

In graph theory, a branch of mathematics, the triconnected components of a biconnected graph are a system of smaller graphs that describe all of the 2-vertex cuts in the graph. An SPQR tree is a tree data structure used in computer science, and more specifically graph algorithms, to represent the triconnected components of a graph. The SPQR tree of a graph may be constructed in linear time and has several applications in dynamic graph algorithms and graph drawing.

In graph theory, the strong product is a way of combining two graphs to make a larger graph. Two vertices are adjacent in the strong product when they come from pairs of vertices in the factor graphs that are either adjacent or identical. The strong product is one of several different graph product operations that have been studied in graph theory. The strong product of any two graphs can be constructed as the union of two other products of the same two graphs, the Cartesian product of graphs and the tensor product of graphs.

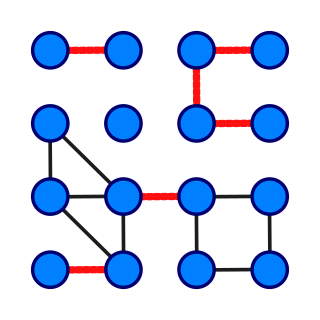
In graph theory, a pseudoforest is an undirected graph in which every connected component has at most one cycle. That is, it is a system of vertices and edges connecting pairs of vertices, such that no two cycles of consecutive edges share any vertex with each other, nor can any two cycles be connected to each other by a path of consecutive edges. A pseudotree is a connected pseudoforest.

In computer science, a Cartesian tree is a binary tree derived from a sequence of numbers. The smallest number in the sequence is at the root of the tree; its left and right subtrees are constructed recursively from the subsequences to the left and right of this number. When all numbers are distinct, the Cartesian tree is uniquely defined from the properties that it is heap-ordered and that a symmetric (in-order) traversal of the tree returns the original sequence.
In graph theory, the planar separator theorem is a form of isoperimetric inequality for planar graphs, that states that any planar graph can be split into smaller pieces by removing a small number of vertices. Specifically, the removal of vertices from an n-vertex graph can partition the graph into disjoint subgraphs each of which has at most vertices.
In mathematics and computer science, an unrooted binary tree is an unrooted tree in which each vertex has either one or three neighbors.
In graph theory, the modular decomposition is a decomposition of a graph into subsets of vertices called modules. A module is a generalization of a connected component of a graph. Unlike connected components, however, one module can be a proper subset of another. Modules therefore lead to a recursive (hierarchical) decomposition of the graph, instead of just a partition.
In graph theory, Robbins' theorem, named after Herbert Robbins (1939), states that the graphs that have strong orientations are exactly the 2-edge-connected graphs. That is, it is possible to choose a direction for each edge of an undirected graph G, turning it into a directed graph that has a path from every vertex to every other vertex, if and only if G is connected and has no bridge.
In distributed computing and geometric graph theory, greedy embedding is a process of assigning coordinates to the nodes of a telecommunications network in order to allow greedy geographic routing to be used to route messages within the network. Although greedy embedding has been proposed for use in wireless sensor networks, in which the nodes already have positions in physical space, these existing positions may differ from the positions given to them by greedy embedding, which may in some cases be points in a virtual space of a higher dimension, or in a non-Euclidean geometry. In this sense, greedy embedding may be viewed as a form of graph drawing, in which an abstract graph is embedded into a geometric space.
In graph theory, a bipolar orientation or st-orientation of an undirected graph is an assignment of a direction to each edge that causes the graph to become a directed acyclic graph with a single source s and a single sink t, and an st-numbering of the graph is a topological ordering of the resulting directed acyclic graph.

In graph theory, a split of an undirected graph is a cut whose cut-set forms a complete bipartite graph. A graph is prime if it has no splits. The splits of a graph can be collected into a tree-like structure called the split decomposition or join decomposition, which can be constructed in linear time. This decomposition has been used for fast recognition of circle graphs and distance-hereditary graphs, as well as for other problems in graph algorithms.
References
- 1 2 Harvey, Nicholas J. A.; Pătraşcu, Mihai; Wen, Yonggang; Yekhanin, Sergey; Chan, Vincent W. S. (2007), "Non-adaptive fault diagnosis for all-optical networks via combinatorial group testing on graphs", 26th IEEE International Conference on Computer Communications (INFOCOM 2007), pp. 697–705, doi:10.1109/INFCOM.2007.87
- 1 2 Sleator, Daniel D.; Tarjan, Robert Endre (1983), "A data structure for dynamic trees", Journal of Computer and System Sciences , 26 (3): 362–391, doi: 10.1016/0022-0000(83)90006-5 , MR 0710253
- 1 2 Harel, Dov; Tarjan, Robert E. (1984), "Fast algorithms for finding nearest common ancestors", SIAM Journal on Computing , 13 (2): 338–355, doi:10.1137/0213024
- ↑ Dietz, Paul F. (1991), "Finding level-ancestors in dynamic trees", Algorithms and data structures (Ottawa, ON, 1991), Lecture Notes in Computer Science, vol. 519, Berlin: Springer, pp. 32–40, doi:10.1007/BFb0028247, MR 1146687
- ↑ Klein, Philip N. (1998), "Computing the edit-distance between unrooted ordered trees", Algorithms—ESA '98 (Venice), Lecture Notes in Computer Science, vol. 1461, Berlin: Springer, pp. 91–102, doi:10.1007/3-540-68530-8_8, MR 1683332
- ↑ Demaine, Erik D.; Mozes, Shay; Rossman, Benjamin; Weimann, Oren (2010), "An optimal decomposition algorithm for tree edit distance", ACM Transactions on Algorithms, 6 (1): A2, doi:10.1007/978-3-540-73420-8_15, MR 2654906
- ↑ Buchsbaum, Adam L.; Westbrook, Jeffery R. (2000), "Maintaining hierarchical graph views", Proceedings of the Eleventh Annual ACM-SIAM Symposium on Discrete Algorithms (San Francisco, CA, 2000), New York: ACM, pp. 566–575, MR 1755515
- ↑ Eppstein, David; Goodrich, Michael T. (2011), "Succinct greedy geometric routing using hyperbolic geometry", IEEE Transactions on Computers , 60 (11): 1571–1580, doi:10.1109/TC.2010.257, MR 2830035
- ↑ Duncan, Christian A.; Eppstein, David; Goodrich, Michael T.; Kobourov, Stephen G.; Nöllenburg, Martin (2013), "Drawing trees with perfect angular resolution and polynomial area", Discrete and Computational Geometry , 49 (2): 157–182, arXiv: 1009.0581 , doi:10.1007/s00454-012-9472-y, MR 3017904
- ↑ Alstrup, Stephen; Lauridsen, Peter W; Sommerlund, Peer; Thorup, Mikkel (1997), "Finding cores of limited length", Algorithms and Data Structures, Lecture Notes in Computer Science Volume, vol. 1272, Springer, pp. 45–54, doi:10.1007/3-540-63307-3_47
- ↑ Bille, Philip; Landau, Gad M.; Raman, Rajeev; Sadakane, Kunihiko; Satti, Srinivasa Rao; Weimann, Oren (2011), "Random access to grammar-compressed strings", Proceedings of the Twenty-Second Annual ACM-SIAM Symposium on Discrete Algorithms, Philadelphia, PA: SIAM, pp. 373–389, MR 2857133