
In graph theory, an orientation of an undirected graph is an assignment of a direction to each edge, turning the initial graph into a directed graph.
In graph theory, an orientation of an undirected graph is an assignment of a direction to each edge, turning the initial graph into a directed graph.
A directed graph is called an oriented graph if none of its pairs of vertices is linked by two mutually symmetric edges. Among directed graphs, the oriented graphs are the ones that have no 2-cycles (that is at most one of (x, y) and (y, x) may be arrows of the graph). [1]
A tournament is an orientation of a complete graph. A polytree is an orientation of an undirected tree. [2] Sumner's conjecture states that every tournament with 2n – 2 vertices contains every polytree with n vertices. [3]
The number of non-isomorphic oriented graphs with n vertices (for n = 1, 2, 3, …) is
Tournaments are in one-to-one correspondence with complete directed graphs (graphs in which there is a directed edge in one or both directions between every pair of distinct vertices). A complete directed graph can be converted to an oriented graph by removing every 2-cycle, and conversely an oriented graph can be converted to a complete directed graph by adding a 2-cycle between every pair of vertices that are not endpoints of an edge; these correspondences are bijective. Therefore, the same sequence of numbers also solves the graph enumeration problem for complete digraphs. There is an explicit but complicated formula for the numbers in this sequence. [4]
A strong orientation is an orientation that results in a strongly connected graph. The closely related totally cyclic orientations are orientations in which every edge belongs to at least one simple cycle. An orientation of an undirected graph G is totally cyclic if and only if it is a strong orientation of every connected component of G. Robbins' theorem states that a graph has a strong orientation if and only if it is 2-edge-connected; disconnected graphs may have totally cyclic orientations, but only if they have no bridges. [5]
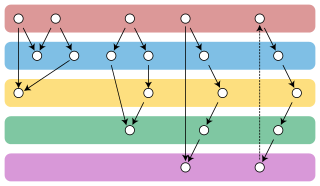
An acyclic orientation is an orientation that results in a directed acyclic graph. Every graph has an acyclic orientation; all acyclic orientations may be obtained by placing the vertices into a sequence, and then directing each edge from the earlier of its endpoints in the sequence to the later endpoint. The Gallai–Hasse–Roy–Vitaver theorem states that a graph has an acyclic orientation in which the longest path has at most k vertices if and only if it can be colored with at most k colors. [6] Acyclic orientations and totally cyclic orientations are related to each other by planar duality. An acyclic orientation with a single source and a single sink is called a bipolar orientation. [7]
A transitive orientation is an orientation such that the resulting directed graph is its own transitive closure. The graphs with transitive orientations are called comparability graphs; they may be defined from a partially ordered set by making two elements adjacent whenever they are comparable in the partial order. [8] A transitive orientation, if one exists, can be found in linear time. [9] However, testing whether the resulting orientation (or any given orientation) is actually transitive requires more time, as it is equivalent in complexity to matrix multiplication.
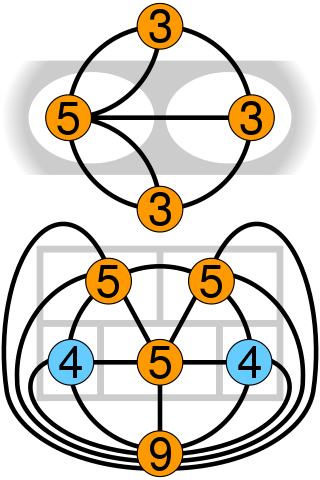
An Eulerian orientation of an undirected graph is an orientation in which each vertex has equal in-degree and out-degree. Eulerian orientations of grid graphs arise in statistical mechanics in the theory of ice-type models. [10]
A Pfaffian orientation has the property that certain even-length cycles in the graph have an odd number of edges oriented in each of the two directions around the cycle. They always exist for planar graphs, but not for certain other graphs. They are used in the FKT algorithm for counting perfect matchings. [11]

In graph theory, a tree is an undirected graph in which any two vertices are connected by exactly one path, or equivalently a connected acyclic undirected graph. A forest is an undirected graph in which any two vertices are connected by at most one path, or equivalently an acyclic undirected graph, or equivalently a disjoint union of trees.

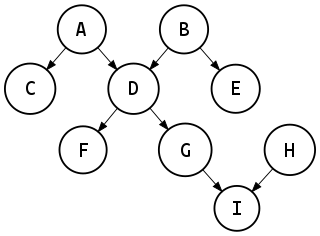
In mathematics, particularly graph theory, and computer science, a directed acyclic graph (DAG) is a directed graph with no directed cycles. That is, it consists of vertices and edges, with each edge directed from one vertex to another, such that following those directions will never form a closed loop. A directed graph is a DAG if and only if it can be topologically ordered, by arranging the vertices as a linear ordering that is consistent with all edge directions. DAGs have numerous scientific and computational applications, ranging from biology to information science to computation (scheduling).

In the mathematical field of graph theory, a Hamiltonian path is a path in an undirected or directed graph that visits each vertex exactly once. A Hamiltonian cycle is a cycle that visits each vertex exactly once. A Hamiltonian path that starts and ends at adjacent vertices can be completed by adding one more edge to form a Hamiltonian cycle, and removing any edge from a Hamiltonian cycle produces a Hamiltonian path. The computational problems of determining whether such paths and cycles exist in graphs are NP-complete; see Hamiltonian path problem for details.
This is a glossary of graph theory. Graph theory is the study of graphs, systems of nodes or vertices connected in pairs by lines or edges.

In discrete mathematics, particularly in graph theory, a graph is a structure consisting of a set of objects where some pairs of the objects are in some sense "related". The objects are represented by abstractions called vertices and each of the related pairs of vertices is called an edge. Typically, a graph is depicted in diagrammatic form as a set of dots or circles for the vertices, joined by lines or curves for the edges.
In graph theory, an Eulerian trail is a trail in a finite graph that visits every edge exactly once. Similarly, an Eulerian circuit or Eulerian cycle is an Eulerian trail that starts and ends on the same vertex. They were first discussed by Leonhard Euler while solving the famous Seven Bridges of Königsberg problem in 1736. The problem can be stated mathematically like this:
In graph theory, an undirected graph H is called a minor of the graph G if H can be formed from G by deleting edges, vertices and by contracting edges.

In the mathematical theory of directed graphs, a graph is said to be strongly connected if every vertex is reachable from every other vertex. The strongly connected components of a directed graph form a partition into subgraphs that are themselves strongly connected. It is possible to test the strong connectivity of a graph, or to find its strongly connected components, in linear time (that is, Θ(V + E )).
In mathematics, and more specifically in graph theory, a polytree is a directed acyclic graph whose underlying undirected graph is a tree. In other words, if we replace its directed edges with undirected edges, we obtain an undirected graph that is both connected and acyclic.

In the mathematical discipline of graph theory, the dual graph of a planar graph G is a graph that has a vertex for each face of G. The dual graph has an edge for each pair of faces in G that are separated from each other by an edge, and a self-loop when the same face appears on both sides of an edge. Thus, each edge e of G has a corresponding dual edge, whose endpoints are the dual vertices corresponding to the faces on either side of e. The definition of the dual depends on the choice of embedding of the graph G, so it is a property of plane graphs rather than planar graphs. For planar graphs generally, there may be multiple dual graphs, depending on the choice of planar embedding of the graph.
In graph theory, a comparability graph is an undirected graph that connects pairs of elements that are comparable to each other in a partial order. Comparability graphs have also been called transitively orientable graphs, partially orderable graphs, containment graphs, and divisor graphs. An incomparability graph is an undirected graph that connects pairs of elements that are not comparable to each other in a partial order.

In graph theory, a strong orientation of an undirected graph is an assignment of a direction to each edge that makes it into a strongly connected graph.

In mathematics, and more specifically in graph theory, a directed graph is a graph that is made up of a set of vertices connected by directed edges, often called arcs.
In graph theory, a Trémaux tree of an undirected graph is a type of spanning tree, generalizing depth-first search trees. They are defined by the property that every edge of connects an ancestor–descendant pair in the tree. Trémaux trees are named after Charles Pierre Trémaux, a 19th-century French author who used a form of depth-first search as a strategy for solving mazes. They have also been called normal spanning trees, especially in the context of infinite graphs.

In graph theory, an ear of an undirected graph G is a path P where the two endpoints of the path may coincide, but where otherwise no repetition of edges or vertices is allowed, so every internal vertex of P has degree two in G. An ear decomposition of an undirected graph G is a partition of its set of edges into a sequence of ears, such that the one or two endpoints of each ear belong to earlier ears in the sequence and such that the internal vertices of each ear do not belong to any earlier ear. Additionally, in most cases the first ear in the sequence must be a cycle. An open ear decomposition or a proper ear decomposition is an ear decomposition in which the two endpoints of each ear after the first are distinct from each other.

In graph theory, an acyclic orientation of an undirected graph is an assignment of a direction to each edge that does not form any directed cycle and therefore makes it into a directed acyclic graph. Every graph has an acyclic orientation.
In graph theory, the Gallai–Hasse–Roy–Vitaver theorem is a form of duality between the colorings of the vertices of a given undirected graph and the orientations of its edges. It states that the minimum number of colors needed to properly color any graph equals one plus the length of a longest path in an orientation of chosen to minimize this path's length. The orientations for which the longest path has minimum length always include at least one acyclic orientation.
In graph theory, Robbins' theorem, named after Herbert Robbins, states that the graphs that have strong orientations are exactly the 2-edge-connected graphs. That is, it is possible to choose a direction for each edge of an undirected graph G, turning it into a directed graph that has a path from every vertex to every other vertex, if and only if G is connected and has no bridge.

In graph theory, a bipolar orientation or st-orientation of an undirected graph is an assignment of a direction to each edge that causes the graph to become a directed acyclic graph with a single source s and a single sink t, and an st-numbering of the graph is a topological ordering of the resulting directed acyclic graph.
In graph theory, a Pfaffian orientation of an undirected graph assigns a direction to each edge, so that certain cycles have an odd number of edges in each direction. When a graph has a Pfaffian orientation, the orientation can be used to count the perfect matchings of the graph. This is the main idea behind the FKT algorithm for counting perfect matchings in planar graphs, which always have Pfaffian orientations. More generally, every graph that does not have the utility graph as a graph minor has a Pfaffian orientation, but does not, nor do infinitely many other minimal non-Pfaffian graphs.