Related Research Articles
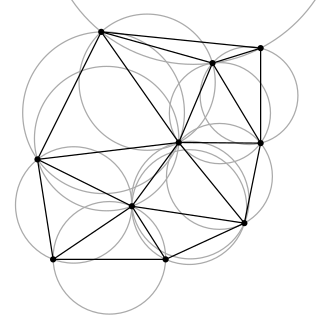
In computational geometry, a Delaunay triangulation or Delone triangulation of a set of points in the plane subdivides their convex hull into triangles whose circumcircles do not contain any of the points. This maximizes the size of the smallest angle in any of the triangles, and tends to avoid sliver triangles.
Computational geometry is a branch of computer science devoted to the study of algorithms which can be stated in terms of geometry. Some purely geometrical problems arise out of the study of computational geometric algorithms, and such problems are also considered to be part of computational geometry. While modern computational geometry is a recent development, it is one of the oldest fields of computing with a history stretching back to antiquity.

In mathematics, a Voronoi diagram is a partition of a plane into regions close to each of a given set of objects. It can be classified also as a tessellation. In the simplest case, these objects are just finitely many points in the plane. For each seed there is a corresponding region, called a Voronoi cell, consisting of all points of the plane closer to that seed than to any other. The Voronoi diagram of a set of points is dual to that set's Delaunay triangulation.
In mathematics, computer science and especially graph theory, a distance matrix is a square matrix containing the distances, taken pairwise, between the elements of a set. Depending upon the application involved, the distance being used to define this matrix may or may not be a metric. If there are N elements, this matrix will have size N×N. In graph-theoretic applications, the elements are more often referred to as points, nodes or vertices.

A Euclidean minimum spanning tree of a finite set of points in the Euclidean plane or higher-dimensional Euclidean space connects the points by a system of line segments with the points as endpoints, minimizing the total length of the segments. In it, any two points can reach each other along a path through the line segments. It can be found as the minimum spanning tree of a complete graph with the points as vertices and the Euclidean distances between points as edge weights.

The Sylvester–Gallai theorem in geometry states that every finite set of points in the Euclidean plane has a line that passes through exactly two of the points or a line that passes through all of them. It is named after James Joseph Sylvester, who posed it as a problem in 1893, and Tibor Gallai, who published one of the first proofs of this theorem in 1944.
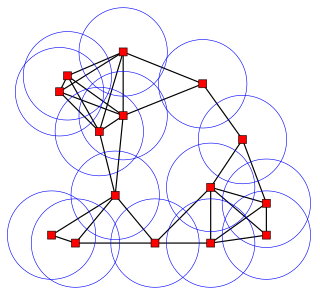
In geometric graph theory, a unit disk graph is the intersection graph of a family of unit disks in the Euclidean plane. That is, it is a graph with one vertex for each disk in the family, and with an edge between two vertices whenever the corresponding vertices lie within a unit distance of each other.
Nearest neighbor search (NNS), as a form of proximity search, is the optimization problem of finding the point in a given set that is closest to a given point. Closeness is typically expressed in terms of a dissimilarity function: the less similar the objects, the larger the function values.

The closest pair of points problem or closest pair problem is a problem of computational geometry: given points in metric space, find a pair of points with the smallest distance between them. The closest pair problem for points in the Euclidean plane was among the first geometric problems that were treated at the origins of the systematic study of the computational complexity of geometric algorithms.

The nearest neighbor graph (NNG) is a directed graph defined for a set of points in a metric space, such as the Euclidean distance in the plane. The NNG has a vertex for each point, and a directed edge from p to q whenever q is a nearest neighbor of p, a point whose distance from p is minimum among all the given points other than p itself.

In geometry, the minimum bounding box or smallest bounding box for a point set S in N dimensions is the box with the smallest measure within which all the points lie. When other kinds of measure are used, the minimum box is usually called accordingly, e.g., "minimum-perimeter bounding box".
In computational geometry, the smallest enclosing box problem is that of finding the oriented minimum bounding box enclosing a set of points. It is a type of bounding volume. "Smallest" may refer to volume, area, perimeter, etc. of the box.
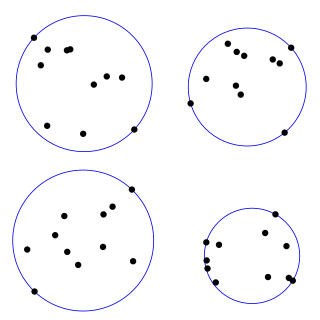
The smallest-circle problem is a computational geometry problem of computing the smallest circle that contains all of a given set of points in the Euclidean plane. The corresponding problem in n-dimensional space, the smallest bounding sphere problem, is to compute the smallest n-sphere that contains all of a given set of points. The smallest-circle problem was initially proposed by the English mathematician James Joseph Sylvester in 1857.
In computational geometry, the fixed-radius near neighbor problem is a variant of the nearest neighbor search problem. In the fixed-radius near neighbor problem, one is given as input a set of points in d-dimensional Euclidean space and a fixed distance Δ. One must design a data structure that, given a query point q, efficiently reports the points of the data structure that are within distance Δ of q. The problem has long been studied; Bentley (1975) cites a 1966 paper by Levinthal that uses this technique as part of a system for visualizing molecular structures, and it has many other applications.
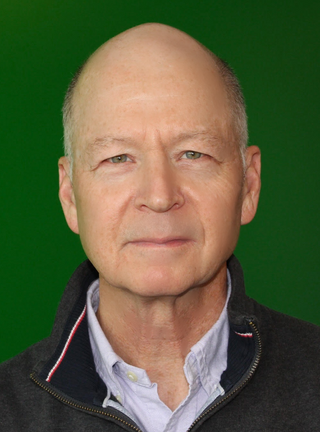
David Mount is a professor at the University of Maryland, College Park department of computer science whose research is in computational geometry.
In the study of algorithms, an LP-type problem is an optimization problem that shares certain properties with low-dimensional linear programs and that may be solved by similar algorithms. LP-type problems include many important optimization problems that are not themselves linear programs, such as the problem of finding the smallest circle containing a given set of planar points. They may be solved by a combination of randomized algorithms in an amount of time that is linear in the number of elements defining the problem, and subexponential in the dimension of the problem.
A geometric separator is a line that partitions a collection of geometric shapes into two subsets, such that proportion of shapes in each subset is bounded, and the number of shapes that do not belong to any subset is small.

In geometric graph theory, a penny graph is a contact graph of unit circles. It is formed from a collection of unit circles that do not cross each other, by creating a vertex for each circle and an edge for every pair of tangent circles. The circles can be represented physically by pennies, arranged without overlapping on a flat surface, with a vertex for each penny and an edge for each two pennies that touch.
In metric geometry and computational geometry, a minimum-diameter spanning tree of a finite set of points in a metric space is a spanning tree in which the diameter is as small as possible.
References
- Franco P. Preparata and Michael Ian Shamos (1985). Computational Geometry - An Introduction . Springer-Verlag. ISBN 0-387-96131-3. 1st edition: ISBN 0-387-96131-3; 2nd printing, corrected and expanded, 1988: ISBN 3-540-96131-3; Russian translation, 1989: ISBN 5-03-001041-6. The proximity problems are covered in chapters 6 and 7.
- ↑ J. R. Sack and J. Urrutia (eds.) (2000). Handbook of Computational Geometry. North Holland. ISBN 0-444-82537-1.
{{cite book}}:|author=has generic name (help) - ↑ V. J. Lumelsky (1985). "On fast computation of distance between line segments". Inf. Process. Lett. 21 (2): 55–61. doi:10.1016/0020-0190(85)90032-8.