
In geometry, a geodesic is a curve representing in some sense the shortest path (arc) between two points in a surface, or more generally in a Riemannian manifold. The term also has meaning in any differentiable manifold with a connection. It is a generalization of the notion of a "straight line".
In differential geometry, a Riemannian manifold or Riemannian space(M, g), so called after the German mathematician Bernhard Riemann, is a real, smooth manifold M equipped with a positive-definite inner product gp on the tangent space TpM at each point p.
Riemannian geometry is the branch of differential geometry that studies Riemannian manifolds, defined as smooth manifolds with a Riemannian metric. This gives, in particular, local notions of angle, length of curves, surface area and volume. From those, some other global quantities can be derived by integrating local contributions.
In differential geometry, the Ricci curvature tensor, named after Gregorio Ricci-Curbastro, is a geometric object which is determined by a choice of Riemannian or pseudo-Riemannian metric on a manifold. It can be considered, broadly, as a measure of the degree to which the geometry of a given metric tensor differs locally from that of ordinary Euclidean space or pseudo-Euclidean space.
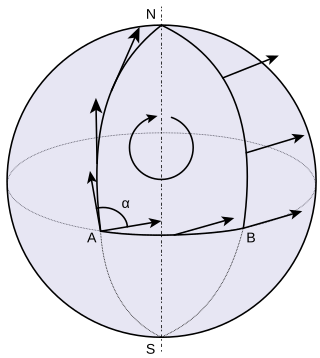
In geometry, parallel transport is a way of transporting geometrical data along smooth curves in a manifold. If the manifold is equipped with an affine connection, then this connection allows one to transport vectors of the manifold along curves so that they stay parallel with respect to the connection.
In Riemannian geometry, the sectional curvature is one of the ways to describe the curvature of Riemannian manifolds. The sectional curvature K(σp) depends on a two-dimensional linear subspace σp of the tangent space at a point p of the manifold. It can be defined geometrically as the Gaussian curvature of the surface which has the plane σp as a tangent plane at p, obtained from geodesics which start at p in the directions of σp. The sectional curvature is a real-valued function on the 2-Grassmannian bundle over the manifold.
In the mathematical field of Riemannian geometry, the scalar curvature is a measure of the curvature of a Riemannian manifold. To each point on a Riemannian manifold, it assigns a single real number determined by the geometry of the metric near that point. It is defined by a complicated explicit formula in terms of partial derivatives of the metric components, although it is also characterized by the volume of infinitesimally small geodesic balls. In the context of the differential geometry of surfaces, the scalar curvature is twice the Gaussian curvature, and completely characterizes the curvature of a surface. In higher dimensions, however, the scalar curvature only represents one particular part of the Riemann curvature tensor.
In mathematics, particularly differential geometry, a Finsler manifold is a differentiable manifold M where a (possibly asymmetric) Minkowski normF(x, −) is provided on each tangent space TxM, that enables one to define the length of any smooth curve γ : [a, b] → M as
This is a glossary of some terms used in Riemannian geometry and metric geometry — it doesn't cover the terminology of differential topology.

In differential geometry, an affine connection is a geometric object on a smooth manifold which connects nearby tangent spaces, so it permits tangent vector fields to be differentiated as if they were functions on the manifold with values in a fixed vector space. Connections are among the simplest methods of defining differentiation of the sections of vector bundles.
In Riemannian geometry, a Jacobi field is a vector field along a geodesic in a Riemannian manifold describing the difference between the geodesic and an "infinitesimally close" geodesic. In other words, the Jacobi fields along a geodesic form the tangent space to the geodesic in the space of all geodesics. They are named after Carl Jacobi.
Myers's theorem, also known as the Bonnet–Myers theorem, is a celebrated, fundamental theorem in the mathematical field of Riemannian geometry. It was discovered by Sumner Byron Myers in 1941. It asserts the following:
In mathematics, a sub-Riemannian manifold is a certain type of generalization of a Riemannian manifold. Roughly speaking, to measure distances in a sub-Riemannian manifold, you are allowed to go only along curves tangent to so-called horizontal subspaces.
In differential geometry, conjugate points or focal points are, roughly, points that can almost be joined by a 1-parameter family of geodesics. For example, on a sphere, the north-pole and south-pole are connected by any meridian. Another viewpoint is that conjugate points tell when the geodesics fail to be length-minimizing. All geodesics are locally length-minimizing, but not globally. For example on a sphere, any geodesic passing through the north-pole can be extended to reach the south-pole, and hence any geodesic segment connecting the poles is not (uniquely) globally length minimizing. This tells us that any pair of antipodal points on the standard 2-sphere are conjugate points.
In differential geometry, the Margulis lemma is a result about discrete subgroups of isometries of a non-positively curved Riemannian manifold. Roughly, it states that within a fixed radius, usually called the Margulis constant, the structure of the orbits of such a group cannot be too complicated. More precisely, within this radius around a point all points in its orbit are in fact in the orbit of a nilpotent subgroup.
In mathematics, comparison theorems are theorems whose statement involves comparisons between various mathematical objects of the same type, and often occur in fields such as calculus, differential equations and Riemannian geometry.
In mathematics, the Cartan–Hadamard theorem is a statement in Riemannian geometry concerning the structure of complete Riemannian manifolds of non-positive sectional curvature. The theorem states that the universal cover of such a manifold is diffeomorphic to a Euclidean space via the exponential map at any point. It was first proved by Hans Carl Friedrich von Mangoldt for surfaces in 1881, and independently by Jacques Hadamard in 1898. Élie Cartan generalized the theorem to Riemannian manifolds in 1928. The theorem was further generalized to a wide class of metric spaces by Mikhail Gromov in 1987; detailed proofs were published by Ballmann (1990) for metric spaces of non-positive curvature and by Alexander & Bishop (1990) for general locally convex metric spaces.

In mathematics, the differential geometry of surfaces deals with the differential geometry of smooth surfaces with various additional structures, most often, a Riemannian metric. Surfaces have been extensively studied from various perspectives: extrinsically, relating to their embedding in Euclidean space and intrinsically, reflecting their properties determined solely by the distance within the surface as measured along curves on the surface. One of the fundamental concepts investigated is the Gaussian curvature, first studied in depth by Carl Friedrich Gauss, who showed that curvature was an intrinsic property of a surface, independent of its isometric embedding in Euclidean space.
In the mathematical field of Riemannian geometry, Toponogov's theorem is a triangle comparison theorem. It is one of a family of comparison theorems that quantify the assertion that a pair of geodesics emanating from a point p spread apart more slowly in a region of high curvature than they would in a region of low curvature.
In mathematics, the Cartan–Ambrose–Hicks theorem is a theorem of Riemannian geometry, according to which the Riemannian metric is locally determined by the Riemann curvature tensor, or in other words, behavior of the curvature tensor under parallel translation determines the metric.


















