The sea level equation (SLE) is the linear, integral equation that describes the sea-level variations associated with the Glacial Isostatic Adjustement (GIA).

Post-glacial rebound is the rise of land masses after the lifting of the huge weight of ice sheets during the last glacial period, which had caused isostatic depression. Post-glacial rebound and isostatic depression are phases of glacial isostasy, the deformation of the Earth's crust in response to changes in ice mass distribution. The direct raising effects of post-glacial rebound are readily apparent in parts of Northern Eurasia, Northern America, Patagonia, and Antarctica. However, through the processes of ocean siphoning and continental levering, the effects of post-glacial rebound on sea level are felt globally far from the locations of current and former ice sheets.
The basic idea of the SLE dates back to 1888, when Woodward published his pioneering work on the form and position of mean sea level, [1] and only later has been refined by Platzman [2] and Farrell [3] in the context of the study of the ocean tides. In the words of Wu and Peltier, [4] the solution of the SLE yields the space– and time–dependent change of ocean bathymetry which is required to keep the gravitational potential of the sea surface constant for a specific deglaciation chronology and viscoelastic earth model. The SLE theory was then developed by other authors as Mitrovica & Peltier, [5] Mitrovica et al. [6] and Spada & Stocchi. [7] In its simplest form, the SLE reads

Mean sea level (MSL) is an average level of the surface of one or more of Earth's oceans from which heights such as elevation may be measured. MSL is a type of vertical datum – a standardised geodetic datum – that is used, for example, as a chart datum in cartography and marine navigation, or, in aviation, as the standard sea level at which atmospheric pressure is measured to calibrate altitude and, consequently, aircraft flight levels. A common and relatively straightforward mean sea-level standard is the midpoint between a mean low and mean high tide at a particular location.
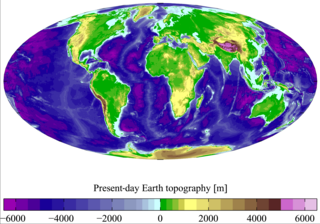
Bathymetry is the study of underwater depth of lake or ocean floors. In other words, bathymetry is the underwater equivalent to hypsometry or topography. The name comes from Greek βαθύς (bathus), "deep", and μέτρον (metron), "measure". Bathymetric charts are typically produced to support safety of surface or sub-surface navigation, and usually show seafloor relief or terrain as contour lines and selected depths (soundings), and typically also provide surface navigational information. Bathymetric maps may also use a Digital Terrain Model and artificial illumination techniques to illustrate the depths being portrayed. The global bathymetry is sometimes combined with topography data to yield a Global Relief Model. Paleobathymetry is the study of past underwater depths.

The geoid is the shape that the ocean surface would take under the influence of the gravity and rotation of Earth alone, if other influences such as winds and tides were absent. This surface is extended through the continents. According to Gauss, who first described it, it is the "mathematical figure of the Earth", a smooth but irregular surface whose shape results from the uneven distribution of mass within and on the surface of Earth. It can be known only through extensive gravitational measurements and calculations. Despite being an important concept for almost 200 years in the history of geodesy and geophysics, it has been defined to high precision only since advances in satellite geodesy in the late 20th century.

where is the sea–level change, is the sea surface variation as seen from Earth's center of mass, and is vertical displacement.



In a more explicit form the SLE can be written as follow:

where is colatitude and is longitude, is time, and are the densities of ice and water, respectively, is the reference surface gravity, is the sea–level Green’s function (dependent upon the and viscoelastic load–deformation coefficients - LDCs), is the ice thickness variation, represents the eustatic term (i.e. the ocean–averaged value of ), and denote spatio-temporal convolutions over the ice- and ocean-covered regions, and the overbar indicates an average over the surface of the oceans that ensures mass conservation.













In a spherical coordinate system, a colatitude is the complementary angle of a given latitude, i.e. the difference between 90° and the latitude. Southern latitudes are given a negative value and are thus denoted with a minus sign.

Longitude, is a geographic coordinate that specifies the east–west position of a point on the Earth's surface. It is an angular measurement, usually expressed in degrees and denoted by the Greek letter lambda (λ). Meridians connect points with the same longitude. By convention, one of these, the Prime Meridian, which passes through the Royal Observatory, Greenwich, England, was allocated the position of 0° longitude. The longitude of other places is measured as the angle east or west from the Prime Meridian, ranging from 0° at the Prime Meridian to +180° eastward and −180° westward. Specifically, it is the angle between a plane through the Prime Meridian and a plane through both poles and the location in question.