In graph theory, a planar graph is a graph that can be embedded in the plane, i.e., it can be drawn on the plane in such a way that its edges intersect only at their endpoints. In other words, it can be drawn in such a way that no edges cross each other. Such a drawing is called a plane graph or planar embedding of the graph. A plane graph can be defined as a planar graph with a mapping from every node to a point on a plane, and from every edge to a plane curve on that plane, such that the extreme points of each curve are the points mapped from its end nodes, and all curves are disjoint except on their extreme points.
In graph theory, an undirected graph H is called a minor of the graph G if H can be formed from G by deleting edges and vertices and by contracting edges.

In graph theory, graph coloring is a special case of graph labeling; it is an assignment of labels traditionally called "colors" to elements of a graph subject to certain constraints. In its simplest form, it is a way of coloring the vertices of a graph such that no two adjacent vertices are of the same color; this is called a vertex coloring. Similarly, an edge coloring assigns a color to each edge so that no two adjacent edges are of the same color, and a face coloring of a planar graph assigns a color to each face or region so that no two faces that share a boundary have the same color.
In theoretical computer science, the subgraph isomorphism problem is a computational task in which two graphs G and H are given as input, and one must determine whether G contains a subgraph that is isomorphic to H. Subgraph isomorphism is a generalization of both the maximum clique problem and the problem of testing whether a graph contains a Hamiltonian cycle, and is therefore NP-complete. However certain other cases of subgraph isomorphism may be solved in polynomial time.

In the mathematical field of graph theory, a graph homomorphism is a mapping between two graphs that respects their structure. More concretely, it is a function between the vertex sets of two graphs that maps adjacent vertices to adjacent vertices.
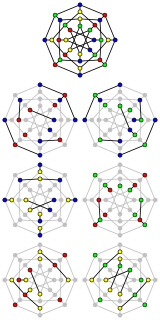
In topological graph theory, a mathematical discipline, a linkless embedding of an undirected graph is an embedding of the graph into three-dimensional Euclidean space in such a way that no two cycles of the graph are linked. A flat embedding is an embedding with the property that every cycle is the boundary of a topological disk whose interior is disjoint from the graph. A linklessly embeddable graph is a graph that has a linkless or flat embedding; these graphs form a three-dimensional analogue of the planar graphs. Complementarily, an intrinsically linked graph is a graph that does not have a linkless embedding.
In mathematics, a universal graph is an infinite graph that contains every finite graph as an induced subgraph. A universal graph of this type was first constructed by Richard Rado and is now called the Rado graph or random graph. More recent work has focused on universal graphs for a graph family F: that is, an infinite graph belonging to F that contains all finite graphs in F. For instance, the Henson graphs are universal in this sense for the i-clique-free graphs.
In mathematics, a dense graph is a graph in which the number of edges is close to the maximal number of edges. The opposite, a graph with only a few edges, is a sparse graph. The distinction between sparse and dense graphs is rather vague, and depends on the context.
In graph theory, Schnyder's theorem is a characterization of planar graphs in terms of the order dimension of their incidence posets. It is named after Walter Schnyder, who published its proof in 1989.
In graph theory, the treewidth of an undirected graph is an integer number which specifies, informally, how far the graph is from being a tree. The smallest treewidth is 1; the graphs with treewidth 1 are exactly the trees and the forests. The graphs with treewidth at most 2 are the Series–parallel graphs. The maximal graphs with treewidth exactly k are called k-trees, and the graphs with treewidth at most k are called partial k-trees. Many other well-studied graph families also have bounded treewidth.

In graph theory, a book embedding is a generalization of planar embedding of a graph to embeddings into a book, a collection of half-planes all having the same line as their boundary. Usually, the vertices of the graph are required to lie on this boundary line, called the spine, and the edges are required to stay within a single half-plane. The book thickness of a graph is the smallest possible number of half-planes for any book embedding of the graph. Book thickness is also called pagenumber, stacknumber or fixed outerthickness. Book embeddings have also been used to define several other graph invariants including the pagewidth and book crossing number.

In the mathematical area of graph theory, an induced path in an undirected graph G is a path that is an induced subgraph of G. That is, it is a sequence of vertices in G such that each two adjacent vertices in the sequence are connected by an edge in G, and each two nonadjacent vertices in the sequence are not connected by any edge in G. An induced path is sometimes called a snake, and the problem of finding long induced paths in hypercube graphs is known as the snake-in-the-box problem.
In graph theory, the planar separator theorem is a form of isoperimetric inequality for planar graphs, that states that any planar graph can be split into smaller pieces by removing a small number of vertices. Specifically, the removal of vertices from an -vertex graph can partition the graph into disjoint subgraphs each of which has at most vertices.
In graph-theoretic mathematics, a star coloring of a graph G is a (proper) vertex coloring in which every path on four vertices uses at least three distinct colors. Equivalently, in a star coloring, the induced subgraphs formed by the vertices of any two colors has connected components that are star graphs. Star coloring has been introduced by Grünbaum (1973). The star chromatic number of G is the fewest colors needed to star color G.
In graph theory, the tree-depth of a connected undirected graph G is a numerical invariant of G, the minimum height of a Trémaux tree for a supergraph of G. This invariant and its close relatives have gone under many different names in the literature, including vertex ranking number, ordered chromatic number, and minimum elimination tree height; it is also closely related to the cycle rank of directed graphs and the star height of regular languages. Intuitively, where the treewidth graph width parameter measures how far a graph is from being a tree, this parameter measures how far a graph is from being a star.
In graph theory, a Trémaux tree of an undirected graph G is a spanning tree of G, rooted at one of its vertices, with the property that every two adjacent vertices in G are related to each other as an ancestor and descendant in the tree. All depth-first search trees and all Hamiltonian paths are Trémaux trees. Trémaux trees are named after Charles Pierre Trémaux, a 19th-century French author who used a form of depth-first search as a strategy for solving mazes. They have also been called normal spanning trees, especially in the context of infinite graphs.

In graph theory, an acyclic orientation of an undirected graph is an assignment of a direction to each edge that does not form any directed cycle and therefore makes it into a directed acyclic graph. Every graph has an acyclic orientation.
In mathematics, the queue number of a graph is a graph invariant defined analogously to stack number using first-in first-out (queue) orderings in place of last-in first-out (stack) orderings.
In graph theory, a family of graphs is said to have bounded expansion if all of its shallow minors are sparse graphs. Many natural families of sparse graphs have bounded expansion. A closely related but stronger property, polynomial expansion, is equivalent to the existence of separator theorems for these families. Families with these properties have efficient algorithms for problems including the subgraph isomorphism problem and model checking for the first order theory of graphs.
In the mathematical fields of graph theory and finite model theory, the logic of graphs deals with formal specifications of graph properties using formulas of mathematical logic. There are several variations in the types of logical operation that can be used in these formulas. The first order logic of graphs concerns formulas in which the variables and predicates concern individual vertices and edges of a graph, while monadic second order graph logic allows quantification over sets of vertices or edges. Logics based on least fixed point operators allow more general predicates over tuples of vertices, but these predicates can only be constructed through fixed-point operators, restricting their power to an intermediate level between first order and monadic second order.
