In statistics and signal processing, step detection (also known as step smoothing, step filtering, shift detection, jump detection or edge detection ) is the process of finding abrupt changes (steps, jumps, shifts) in the mean level of a time series or signal. It is usually considered as a special case of the statistical method known as change detection or change point detection. Often, the step is small and the time series is corrupted by some kind of noise, and this makes the problem challenging because the step may be hidden by the noise. Therefore, statistical and/or signal processing algorithms are often required.
Contents
- Algorithms
- Top-down
- Bottom-up
- Sliding window
- Global
- Linear versus nonlinear signal processing methods for step detection
- Step detection and piecewise constant signals
- Step detection as level set recovery
- Step detection as 0-degree spline fitting
- Generalized step detection by piecewise constant denoising
- Step detection using the Potts model
- See also
- References
- External links
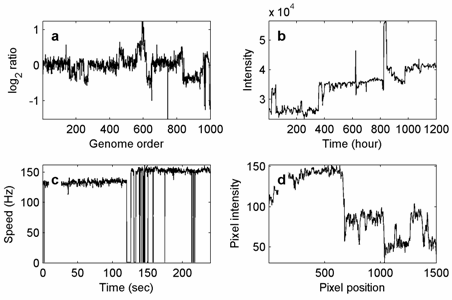
The step detection problem occurs in multiple scientific and engineering contexts, for example in statistical process control [1] (the control chart being the most directly related method), in exploration geophysics (where the problem is to segment a well-log recording into stratigraphic zones [2] ), in genetics (the problem of separating microarray data into similar copy-number regimes [3] ), and in biophysics (detecting state transitions in a molecular machine as recorded in time-position traces [4] ). For 2D signals, the related problem of edge detection has been studied intensively for image processing. [5]

















