
Linear algebra is the branch of mathematics concerning linear equations such as:

Texture mapping is a method for mapping a texture on a computer-generated graphic. "Texture" in this context can be high frequency detail, surface texture, or color.

A scene graph is a general data structure commonly used by vector-based graphics editing applications and modern computer games, which arranges the logical and often spatial representation of a graphical scene. It is a collection of nodes in a graph or tree structure. A tree node may have many children but only a single parent, with the effect of a parent applied to all its child nodes; an operation performed on a group automatically propagates its effect to all of its members. In many programs, associating a geometrical transformation matrix at each group level and concatenating such matrices together is an efficient and natural way to process such operations. A common feature, for instance, is the ability to group related shapes and objects into a compound object that can then be manipulated as easily as a single object.
Collision detection is the computational problem of detecting an intersection of two or more spatial objects, commonly computer graphics objects. It has applications in various computing fields, primarily in computer graphics, computer games, computer simulations, robotics and computational physics. Collision detection is a classic problem of computational geometry. Collision detection algorithms can be divided into operating on 2D or 3D spatial objects.

In continuum mechanics, stress is a physical quantity that describes forces present during deformation. For example, an object being pulled apart, such as a stretched elastic band, is subject to tensile stress and may undergo elongation. An object being pushed together, such as a crumpled sponge, is subject to compressive stress and may undergo shortening. The greater the force and the smaller the cross-sectional area of the body on which it acts, the greater the stress. Stress has dimension of force per area, with SI units of newtons per square meter (N/m2) or pascal (Pa).
Stress–strain analysis is an engineering discipline that uses many methods to determine the stresses and strains in materials and structures subjected to forces. In continuum mechanics, stress is a physical quantity that expresses the internal forces that neighboring particles of a continuous material exert on each other, while strain is the measure of the deformation of the material.
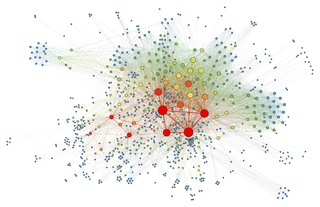
Force-directed graph drawing algorithms are a class of algorithms for drawing graphs in an aesthetically-pleasing way. Their purpose is to position the nodes of a graph in two-dimensional or three-dimensional space so that all the edges are of more or less equal length and there are as few crossing edges as possible, by assigning forces among the set of edges and the set of nodes, based on their relative positions, and then using these forces either to simulate the motion of the edges and nodes or to minimize their energy.

Skeletal animation or rigging is a technique in computer animation in which a character is represented in two parts: a polygonal or parametric mesh representation of the surface of the object, and a hierarchical set of interconnected parts, a virtual armature used to animate the mesh. While this technique is often used to animate humans and other organic figures, it only serves to make the animation process more intuitive, and the same technique can be used to control the deformation of any object—such as a door, a spoon, a building, or a galaxy. When the animated object is more general than, for example, a humanoid character, the set of "bones" may not be hierarchical or interconnected, but simply represent a higher-level description of the motion of the part of mesh it is influencing.
In computer graphics, level of detail (LOD) refers to the complexity of a 3D model representation. LOD can be decreased as the model moves away from the viewer or according to other metrics such as object importance, viewpoint-relative speed or position. LOD techniques increase the efficiency of rendering by decreasing the workload on graphics pipeline stages, usually vertex transformations. The reduced visual quality of the model is often unnoticed because of the small effect on object appearance when distant or moving fast.

A physics engine is computer software that provides an approximate simulation of certain physical systems, such as rigid body dynamics, soft body dynamics, and fluid dynamics, of use in the domains of computer graphics, video games and film (CGI). Their main uses are in video games, in which case the simulations are in real-time. The term is sometimes used more generally to describe any software system for simulating physical phenomena, such as high-performance scientific simulation.

In 3D computer graphics, polygonal modeling is an approach for modeling objects by representing or approximating their surfaces using polygon meshes. Polygonal modeling is well suited to scanline rendering and is therefore the method of choice for real-time computer graphics. Alternate methods of representing 3D objects include NURBS surfaces, subdivision surfaces, and equation-based representations used in ray tracers.

Path tracing is a computer graphics Monte Carlo method of rendering images of three-dimensional scenes such that the global illumination is faithful to reality. Fundamentally, the algorithm is integrating over all the illuminance arriving to a single point on the surface of an object. This illuminance is then reduced by a surface reflectance function (BRDF) to determine how much of it will go towards the viewpoint camera. This integration procedure is repeated for every pixel in the output image. When combined with physically accurate models of surfaces, accurate models of real light sources, and optically correct cameras, path tracing can produce still images that are indistinguishable from photographs.

Geometry processing is an area of research that uses concepts from applied mathematics, computer science and engineering to design efficient algorithms for the acquisition, reconstruction, analysis, manipulation, simulation and transmission of complex 3D models. As the name implies, many of the concepts, data structures, and algorithms are directly analogous to signal processing and image processing. For example, where image smoothing might convolve an intensity signal with a blur kernel formed using the Laplace operator, geometric smoothing might be achieved by convolving a surface geometry with a blur kernel formed using the Laplace-Beltrami operator.
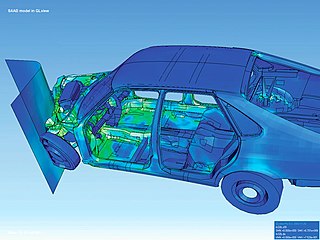
The finite element method (FEM) is a popular method for numerically solving differential equations arising in engineering and mathematical modeling. Typical problem areas of interest include the traditional fields of structural analysis, heat transfer, fluid flow, mass transport, and electromagnetic potential.
In mathematics and physics, vector is a term that refers informally to some quantities that cannot be expressed by a single number, or to elements of some vector spaces.
Geometric feature learning is a technique combining machine learning and computer vision to solve visual tasks. The main goal of this method is to find a set of representative features of geometric form to represent an object by collecting geometric features from images and learning them using efficient machine learning methods. Humans solve visual tasks and can give fast response to the environment by extracting perceptual information from what they see. Researchers simulate humans' ability of recognizing objects to solve computer vision problems. For example, M. Mata et al.(2002) applied feature learning techniques to the mobile robot navigation tasks in order to avoid obstacles. They used genetic algorithms for learning features and recognizing objects (figures). Geometric feature learning methods can not only solve recognition problems but also predict subsequent actions by analyzing a set of sequential input sensory images, usually some extracting features of images. Through learning, some hypothesis of the next action are given and according to the probability of each hypothesis give a most probable action. This technique is widely used in the area of artificial intelligence.
Physically based animation is an area of interest within computer graphics concerned with the simulation of physically plausible behaviors at interactive rates. Advances in physically based animation are often motivated by the need to include complex, physically inspired behaviors in video games, interactive simulations, and movies. Although off-line simulation methods exist to solve most all of the problems studied in physically-based animation, these methods are intended for applications that necessitate physical accuracy and slow, detailed computations. In contrast to methods common in offline simulation, techniques in physically based animation are concerned with physical plausibility, numerical stability, and visual appeal over physical accuracy. Physically based animation is often limited to loose approximations of physical behaviors because of the strict time constraints imposed by interactive applications. The target frame rate for interactive applications such as games and simulations is often 25-60 hertz, with only a small fraction of the time allotted to an individual frame remaining for physical simulation. Simplified models of physical behaviors are generally preferred if they are more efficient, easier to accelerate, or satisfy desirable mathematical properties. Fine details are not important when the overriding goal of a visualization is aesthetic appeal or the maintenance of player immersion since these details are often difficult for humans to notice or are otherwise impossible to distinguish at human scales.
This is a glossary of terms relating to computer graphics.
