Astrobiology is a scientific field within the life and environmental sciences that studies the origins, early evolution, distribution, and future of life in the universe by investigating its deterministic conditions and contingent events. As a discipline, astrobiology is founded on the premise that life may exist beyond Earth.

A Mars rover is a remote-controlled motor vehicle designed to travel on the surface of Mars. Rovers have several advantages over stationary landers: they examine more territory, they can be directed to interesting features, they can place themselves in sunny positions to weather winter months, and they can advance the knowledge of how to perform very remote robotic vehicle control. They serve a different purpose than orbital spacecraft like Mars Reconnaissance Orbiter. A more recent development is the Mars helicopter.

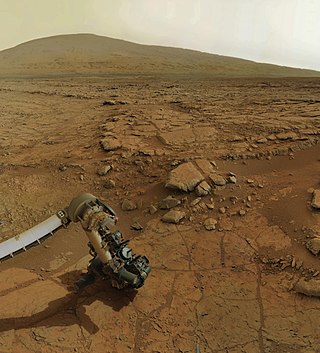
Mars Science Laboratory (MSL) is a robotic space probe mission to Mars launched by NASA on November 26, 2011, which successfully landed Curiosity, a Mars rover, in Gale Crater on August 6, 2012. The overall objectives include investigating Mars' habitability, studying its climate and geology, and collecting data for a human mission to Mars. The rover carries a variety of scientific instruments designed by an international team.
The possibility of life on Mars is a subject of interest in astrobiology due to the planet's proximity and similarities to Earth. To date, no proof of past or present life has been found on Mars. Cumulative evidence suggests that during the ancient Noachian time period, the surface environment of Mars had liquid water and may have been habitable for microorganisms, but habitable conditions do not necessarily indicate life.
A biosignature is any substance – such as an element, isotope, molecule, or phenomenon that provides scientific evidence of past or present life. Measurable attributes of life include its complex physical or chemical structures and its use of free energy and the production of biomass and wastes. A biosignature can provide evidence for living organisms outside the Earth and can be directly or indirectly detected by searching for their unique byproducts.
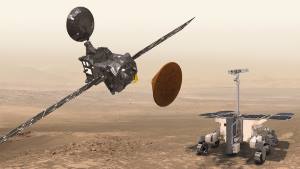
ExoMars is an astrobiology programme of the European Space Agency (ESA) and the Russian space agency (Roscosmos).

The Astrobiology Field Laboratory (AFL) was a proposed NASA rover that would have conducted a search for life on Mars. This proposed mission, which was not funded, would have landed a rover on Mars in 2016 and explore a site for habitat. Examples of such sites are an active or extinct hydrothermal deposit, a dry lake or a specific polar site.
Interplanetary contamination refers to biological contamination of a planetary body by a space probe or spacecraft, either deliberate or unintentional.
Rosalind Franklin, previously known as the ExoMars rover, is a planned robotic Mars rover, part of the international ExoMars programme led by the European Space Agency and the Russian Roscosmos State Corporation. The mission was scheduled to launch in July 2020, but was postponed to 2022. The 2022 Russian invasion of Ukraine has caused an indefinite delay of the programme, as the member states of the ESA voted to suspend the joint mission with Russia; in July 2022, ESA terminated its cooperation on the project with Russia. As of May 2022, the launch of the rover is not expected to occur before 2028 due to the need for a new non-Russian landing platform.
Curiosity is a car-sized Mars rover exploring Gale crater and Mount Sharp on Mars as part of NASA's Mars Science Laboratory (MSL) mission. Curiosity was launched from Cape Canaveral (CCAFS) on November 26, 2011, at 15:02:00 UTC and landed on Aeolis Palus inside Gale crater on Mars on August 6, 2012, 05:17:57 UTC. The Bradbury Landing site was less than 2.4 km (1.5 mi) from the center of the rover's touchdown target after a 560 million km (350 million mi) journey.

Bradbury Landing is the August 6, 2012, landing site within Gale crater on planet Mars of the Mars Science Laboratory (MSL) Curiosity rover. On August 22, 2012, on what would have been his 92nd birthday, NASA named the site for author Ray Bradbury, who had died on June 5, 2012. The coordinates of the landing site on Mars are: 4.5895°S 137.4417°E.
Mars 2020 is a Mars rover mission that includes the rover Perseverance, the small robotic helicopter Ingenuity, and associated delivery systems, as part of NASA's Mars Exploration Program. Mars 2020 was launched from Earth on an Atlas V launch vehicle at 11:50:01 UTC on 30 July 2020, and confirmation of touch down in the Martian crater Jezero was received at 20:55 UTC on 18 February 2021. On 5 March 2021, NASA named the landing site of the rover Octavia E. Butler Landing. As of 29 November 2023, Perseverance and Ingenuity have been on Mars for 987 sols.

Icebreaker Life is a Mars lander mission concept proposed to NASA's Discovery Program. The mission involves a stationary lander that would be a near copy of the successful 2008 Phoenix and InSight spacecraft, but would carry an astrobiology scientific payload, including a drill to sample ice-cemented ground in the northern plains to conduct a search for biosignatures of current or past life on Mars.

Planetary Instrument for X-Ray Lithochemistry (PIXL) is an X-ray fluorescence spectrometer to determine the fine scale elemental composition of Martian surface materials designed for the Perseverance rover as part of the Mars 2020 mission.
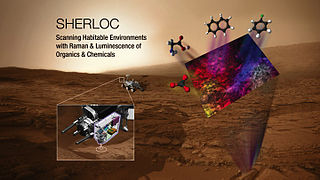
Scanning Habitable Environments with Raman and Luminescence for Organics and Chemicals (SHERLOC) is an ultraviolet Raman spectrometer that uses fine-scale imaging and an ultraviolet (UV) laser to determine fine-scale mineralogy, and detect organic compounds designed for the Perseverance rover as part of the Mars 2020 mission. It was constructed at the Jet Propulsion Laboratory with major subsystems being delivered from Malin Space Science Systems and Los Alamos National Laboratory. The Principal Investigator is Luther Beegle, and the Deputy Principal Investigator is Rohit Bhartia.
The Mars Organic Molecule Analyser (MOMA) is a mass spectrometer-based instrument on board the Rosalind Franklin rover to be launched in 2028 to Mars on an astrobiology mission. It will search for organic compounds in the collected soil samples. By characterizing the molecular structures of detected organics, MOMA can provide insights into potential molecular biosignatures. MOMA will be able to detect organic molecules at concentrations as low as 10 parts-per-billion by weight (ppbw). MOMA examines solid crushed samples exclusively; it does not perform atmospheric analyses.
Mars Multispectral Imager for Subsurface Studies (MA-MISS) is a miniaturized imaging spectrometer designed to provide imaging and spectra by reflectance in the near-infrared (NIR) wavelength region and determine the mineral composition and stratigraphy. The instrument is part of the science payload on board the European Rosalind Franklin rover, tasked to search for biosignatures, and scheduled to land on Mars in spring 2023. MA-MISS is essentially inside a drill on the Rover, and will take measurements of the sub-surface directly.
Raman Laser Spectrometer (RLS) is a miniature Raman spectrometer that is part of the science payload on board the European Space Agency'sRosalind Franklin rover, tasked to search for biosignatures and biomarkers on Mars. The rover is planned to be launched in August–October 2022 and land on Mars in spring 2023.
ADRON-RM is a neutron spectrometer to search for subsurface water ice and hydrated minerals. This analyser is part of the science payload on board the European Space Agency'sRosalind Franklin rover, tasked to search for biosignatures and biomarkers on Mars. The rover is planned to be launched in August–October 2022 and land on Mars in spring 2023.

Perseverance, nicknamed Percy, is a car-sized Mars rover designed to explore the Jezero crater on Mars as part of NASA's Mars 2020 mission. It was manufactured by the Jet Propulsion Laboratory and launched on July 30, 2020, at 11:50 UTC. Confirmation that the rover successfully landed on Mars was received on February 18, 2021, at 20:55 UTC. As of 27 November 2023, Perseverance has been active on Mars for 985 sols since its landing. Following the rover's arrival, NASA named the landing site Octavia E. Butler Landing.




