
Principal component analysis (PCA) is a linear dimensionality reduction technique with applications in exploratory data analysis, visualization and data preprocessing.
In mathematics, a Hermitian matrix is a complex square matrix that is equal to its own conjugate transpose—that is, the element in the i-th row and j-th column is equal to the complex conjugate of the element in the j-th row and i-th column, for all indices i and j:
Rayleigh quotient iteration is an eigenvalue algorithm which extends the idea of the inverse iteration by using the Rayleigh quotient to obtain increasingly accurate eigenvalue estimates.
In numerical analysis, inverse iteration is an iterative eigenvalue algorithm. It allows one to find an approximate eigenvector when an approximation to a corresponding eigenvalue is already known. The method is conceptually similar to the power method. It appears to have originally been developed to compute resonance frequencies in the field of structural mechanics.
In numerical linear algebra, the QR algorithm or QR iteration is an eigenvalue algorithm: that is, a procedure to calculate the eigenvalues and eigenvectors of a matrix. The QR algorithm was developed in the late 1950s by John G. F. Francis and by Vera N. Kublanovskaya, working independently. The basic idea is to perform a QR decomposition, writing the matrix as a product of an orthogonal matrix and an upper triangular matrix, multiply the factors in the reverse order, and iterate.
In numerical linear algebra, the Arnoldi iteration is an eigenvalue algorithm and an important example of an iterative method. Arnoldi finds an approximation to the eigenvalues and eigenvectors of general matrices by constructing an orthonormal basis of the Krylov subspace, which makes it particularly useful when dealing with large sparse matrices.
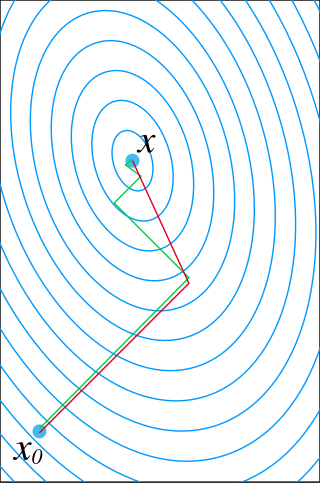
In mathematics, the conjugate gradient method is an algorithm for the numerical solution of particular systems of linear equations, namely those whose matrix is positive-semidefinite. The conjugate gradient method is often implemented as an iterative algorithm, applicable to sparse systems that are too large to be handled by a direct implementation or other direct methods such as the Cholesky decomposition. Large sparse systems often arise when numerically solving partial differential equations or optimization problems.
In matrix theory, the Perron–Frobenius theorem, proved by Oskar Perron and Georg Frobenius, asserts that a real square matrix with positive entries has a unique eigenvalue of largest magnitude and that eigenvalue is real. The corresponding eigenvector can be chosen to have strictly positive components, and also asserts a similar statement for certain classes of nonnegative matrices. This theorem has important applications to probability theory ; to the theory of dynamical systems ; to economics ; to demography ; to social networks ; to Internet search engines (PageRank); and even to ranking of American football teams. The first to discuss the ordering of players within tournaments using Perron–Frobenius eigenvectors is Edmund Landau.
In numerical analysis, a multigrid method is an algorithm for solving differential equations using a hierarchy of discretizations. They are an example of a class of techniques called multiresolution methods, very useful in problems exhibiting multiple scales of behavior. For example, many basic relaxation methods exhibit different rates of convergence for short- and long-wavelength components, suggesting these different scales be treated differently, as in a Fourier analysis approach to multigrid. MG methods can be used as solvers as well as preconditioners.
The Rayleigh–Ritz method is a direct numerical method of approximating eigenvalues, originated in the context of solving physical boundary value problems and named after Lord Rayleigh and Walther Ritz.
In linear algebra, it is often important to know which vectors have their directions unchanged by a given linear transformation. An eigenvector or characteristic vector is such a vector. Thus an eigenvector of a linear transformation is scaled by a constant factor when the linear transformation is applied to it: . The corresponding eigenvalue, characteristic value, or characteristic root is the multiplying factor .
The Lanczos algorithm is an iterative method devised by Cornelius Lanczos that is an adaptation of power methods to find the "most useful" eigenvalues and eigenvectors of an Hermitian matrix, where is often but not necessarily much smaller than . Although computationally efficient in principle, the method as initially formulated was not useful, due to its numerical instability.
In mathematics, preconditioning is the application of a transformation, called the preconditioner, that conditions a given problem into a form that is more suitable for numerical solving methods. Preconditioning is typically related to reducing a condition number of the problem. The preconditioned problem is then usually solved by an iterative method.
In mathematics, power iteration is an eigenvalue algorithm: given a diagonalizable matrix , the algorithm will produce a number , which is the greatest eigenvalue of , and a nonzero vector , which is a corresponding eigenvector of , that is, . The algorithm is also known as the Von Mises iteration.
In mathematics, a graph partition is the reduction of a graph to a smaller graph by partitioning its set of nodes into mutually exclusive groups. Edges of the original graph that cross between the groups will produce edges in the partitioned graph. If the number of resulting edges is small compared to the original graph, then the partitioned graph may be better suited for analysis and problem-solving than the original. Finding a partition that simplifies graph analysis is a hard problem, but one that has applications to scientific computing, VLSI circuit design, and task scheduling in multiprocessor computers, among others. Recently, the graph partition problem has gained importance due to its application for clustering and detection of cliques in social, pathological and biological networks. For a survey on recent trends in computational methods and applications see Buluc et al. (2013). Two common examples of graph partitioning are minimum cut and maximum cut problems.
In linear algebra, eigendecomposition is the factorization of a matrix into a canonical form, whereby the matrix is represented in terms of its eigenvalues and eigenvectors. Only diagonalizable matrices can be factorized in this way. When the matrix being factorized is a normal or real symmetric matrix, the decomposition is called "spectral decomposition", derived from the spectral theorem.

In multivariate statistics, spectral clustering techniques make use of the spectrum (eigenvalues) of the similarity matrix of the data to perform dimensionality reduction before clustering in fewer dimensions. The similarity matrix is provided as an input and consists of a quantitative assessment of the relative similarity of each pair of points in the dataset.
The image segmentation problem is concerned with partitioning an image into multiple regions according to some homogeneity criterion. This article is primarily concerned with graph theoretic approaches to image segmentation applying graph partitioning via minimum cut or maximum cut. Segmentation-based object categorization can be viewed as a specific case of spectral clustering applied to image segmentation.

Andrew Knyazev is an American mathematician. He graduated from the Faculty of Computational Mathematics and Cybernetics of Moscow State University under the supervision of Evgenii Georgievich D'yakonov in 1981 and obtained his PhD in Numerical Mathematics at the Russian Academy of Sciences under the supervision of Vyacheslav Ivanovich Lebedev in 1985. He worked at the Kurchatov Institute between 1981–1983, and then to 1992 at the Marchuk Institute of Numerical Mathematics of the Russian Academy of Sciences, headed by Gury Marchuk.
SLEPc is a software library for the parallel computation of eigenvalues and eigenvectors of large, sparse matrices. It can be seen as a module of PETSc that provides solvers for different types of eigenproblems, including linear and nonlinear, as well as the SVD. Recent versions also include support for matrix functions. It uses the MPI standard for parallelization. Both real and complex arithmetic are supported, with single, double and quadruple precision.















































