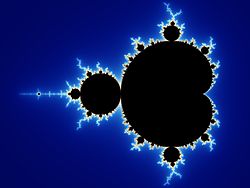
The Mandelbrot set, one of the most famous examples of mathematical visualization.
Mathematical phenomena can be understood and explored via visualization. Classically, this consisted of two-dimensional drawings or building three-dimensional models (particularly plaster models in the 19th and early 20th century). In contrast, today it most frequently consists of using computers to make static two- or three-dimensional drawings, animations, or interactive programs. Writing programs to visualize mathematics is an aspect of computational geometry.
Geometry can be defined as the study of shapes their size, angles, dimensions and proportions[1]
This section needs expansion. You can help by adding to it. (August 2020)
Linear algebra
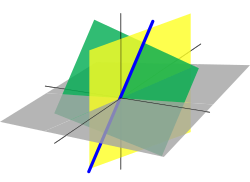
In three-dimensional Euclidean space, these three planes represent solutions of linear equations, and their intersection represents the set of common solutions: in this case, a unique point. The blue line is the common solution to two of these equations.
This section needs expansion. You can help by adding to it. (August 2020)
This section needs expansion. You can help by adding to it. (August 2020)
In complex analysis, functions of the complex plane are inherently 4-dimensional, but there is no natural geometric projection into lower dimensional visual representations. Instead, colour vision is exploited to capture dimensional information using techniques such as domain coloring.
Chaos theory
A plot of the Lorenz attractor for values r = 28, σ = 10, b = 8/3
This section needs expansion. You can help by adding to it. (August 2020)
This section needs expansion. You can help by adding to it. (August 2020)
Topology
A table of all prime knots with seven crossings or fewer (not including mirror images).
This section needs expansion. You can help by adding to it. (August 2020)
Many people have a vivid “mind’s eye,” but a team of British scientists has found that tens of millions of people cannot conjure images. The lack of a mental camera is known as aphantasia, and millions more experience extraordinarily strong mental imagery, called hyperphantasia. Researchers are studying how these two conditions arise through changes in the wiring of the brain.
Visualization played an important role at the beginning of topological knot theory, when polyhedral decompositions were used to compute the homology of covering spaces of knots. Extending to 3 dimensions the physically impossible Riemann surfaces used to classify all closed orientable 2-manifolds, Heegaard's 1898 thesis "looked at" similar structures for functions of two complex variables, taking an imaginary 4-dimensional surface in Euclidean 6-space (corresponding to the function f=x^2-y^3) and projecting it stereographically (with multiplicities) onto the 3-sphere. In the 1920s Alexander and Briggs used this technique to compute the homology of cyclic branched covers of knots with 8 or fewer crossings, successfully distinguishing them all from each other (and the unknot). By 1932 Reidemeister extended this to 9 crossings, relying on linking numbers between branch curves of non-cyclic knot covers. The fact that these imaginary objects have no "real" existence does not stand in the way of their usefulness for proving knots distinct. It was the key to Perko's 1973 discovery of the duplicate knot type in Little's 1899 table of 10-crossing knots.
Graph theory
A force-based network visualization.
This section needs expansion. You can help by adding to it. (August 2020)
Permutation groups have nice visualizations of their elements that assist in explaining their structure—e.g., the rotated and flipped regular p-gons that comprise the dihedral group of order 2p. They may be used to "see" the relationships among linking numbers between branch curves of dihedral covering spaces of knots and links.[3]
This section needs expansion. You can help by adding to it. (August 2020)
Stephen Wolfram's book on cellular automata, A New Kind of Science (2002), is one of the most intensely visual books published in the field of mathematics. It has been criticized for being too heavily visual, with much information conveyed by pictures that do not have formal meaning.[5]
Computation
"Inelegant" is a translation of Knuth's version of the algorithm with a subtraction-based remainder-loop replacing his use of division (or a "modulus" instruction). Derived from Knuth 1973:2–4.
This section needs expansion. You can help by adding to it. (August 2020)
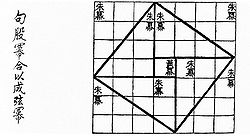
Proofs without words have existed since antiquity, as in the Pythagorean theorem proof found in the Zhoubi Suanjing Chinese text which dates from 1046 BC to 256 BC.
Sphere eversion – that a sphere can be turned inside out in 3 dimension if allowed to pass through itself, but without kinks – was a startling and counter-intuitive result, originally proven via abstract means, later demonstrated graphically, first in drawings, later in computer animation.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.