
Dijkstra's algorithm is an algorithm for finding the shortest paths between nodes in a weighted graph, which may represent, for example, road networks. It was conceived by computer scientist Edsger W. Dijkstra in 1956 and published three years later.

Breadth-first search (BFS) is an algorithm for searching a tree data structure for a node that satisfies a given property. It starts at the tree root and explores all nodes at the present depth prior to moving on to the nodes at the next depth level. Extra memory, usually a queue, is needed to keep track of the child nodes that were encountered but not yet explored.
A* is a graph traversal and pathfinding algorithm that is used in many fields of computer science due to its completeness, optimality, and optimal efficiency. Given a weighted graph, a source node and a goal node, the algorithm finds the shortest path from source to goal.
In numerical analysis, hill climbing is a mathematical optimization technique which belongs to the family of local search. It is an iterative algorithm that starts with an arbitrary solution to a problem, then attempts to find a better solution by making an incremental change to the solution. If the change produces a better solution, another incremental change is made to the new solution, and so on until no further improvements can be found.
In computer science, iterative deepening search or more specifically iterative deepening depth-first search is a state space/graph search strategy in which a depth-limited version of depth-first search is run repeatedly with increasing depth limits until the goal is found. IDDFS is optimal, meaning that it finds the shallowest goal. Since it visits all the nodes in the search tree down to depth before visiting any nodes at depth , the cumulative order in which nodes are first visited is effectively the same as in breadth-first search. However, IDDFS uses much less memory.
In computer science, beam search is a heuristic search algorithm that explores a graph by expanding the most promising node in a limited set. Beam search is a modification of best-first search that reduces its memory requirements. Best-first search is a graph search which orders all partial solutions (states) according to some heuristic. But in beam search, only a predetermined number of best partial solutions are kept as candidates. It is thus a greedy algorithm.
Iterative deepening A* (IDA*) is a graph traversal and path search algorithm that can find the shortest path between a designated start node and any member of a set of goal nodes in a weighted graph. It is a variant of iterative deepening depth-first search that borrows the idea to use a heuristic function to conservatively estimate the remaining cost to get to the goal from the A* search algorithm. Since it is a depth-first search algorithm, its memory usage is lower than in A*, but unlike ordinary iterative deepening search, it concentrates on exploring the most promising nodes and thus does not go to the same depth everywhere in the search tree. Unlike A*, IDA* does not utilize dynamic programming and therefore often ends up exploring the same nodes many times.
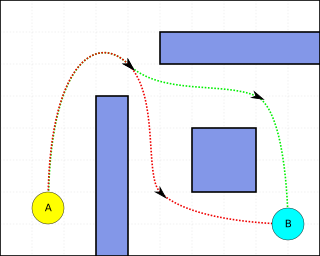
Pathfinding or pathing is the search, by a computer application, for the shortest route between two points. It is a more practical variant on solving mazes. This field of research is based heavily on Dijkstra's algorithm for finding the shortest path on a weighted graph.
Bidirectional search is a graph search algorithm that finds a shortest path from an initial vertex to a goal vertex in a directed graph. It runs two simultaneous searches: one forward from the initial state, and one backward from the goal, stopping when the two meet. The reason for this approach is that in many cases it is faster: for instance, in a simplified model of search problem complexity in which both searches expand a tree with branching factor b, and the distance from start to goal is d, each of the two searches has complexity O(bd/2) (in Big O notation), and the sum of these two search times is much less than the O(bd) complexity that would result from a single search from the beginning to the goal.
In the study of path-finding problems in artificial intelligence, a heuristic function is said to be consistent, or monotone, if its estimate is always less than or equal to the estimated distance from any neighbouring vertex to the goal, plus the cost of reaching that neighbour.
In computer science, specifically in algorithms related to pathfinding, a heuristic function is said to be admissible if it never overestimates the cost of reaching the goal, i.e. the cost it estimates to reach the goal is not higher than the lowest possible cost from the current point in the path. In other words, it should act as a lower bound.
In mathematical optimization and computer science, heuristic is a technique designed for problem solving more quickly when classic methods are too slow for finding an exact or approximate solution, or when classic methods fail to find any exact solution in a search space. This is achieved by trading optimality, completeness, accuracy, or precision for speed. In a way, it can be considered a shortcut.
In computer science, B* is a best-first graph search algorithm that finds the least-cost path from a given initial node to any goal node. First published by Hans Berliner in 1979, it is related to the A* search algorithm.
D* is any one of the following three related incremental search algorithms:
In computer science, fringe search is a graph search algorithm that finds the least-cost path from a given initial node to one goal node.
Incremental heuristic search algorithms combine both incremental and heuristic search to speed up searches of sequences of similar search problems, which is important in domains that are only incompletely known or change dynamically. Incremental search has been studied at least since the late 1960s. Incremental search algorithms reuse information from previous searches to speed up the current search and solve search problems potentially much faster than solving them repeatedly from scratch. Similarly, heuristic search has also been studied at least since the late 1960s.
SMA* or Simplified Memory Bounded A* is a shortest path algorithm based on the A* algorithm. The main advantage of SMA* is that it uses a bounded memory, while the A* algorithm might need exponential memory. All other characteristics of SMA* are inherited from A*.
In computer science, anytime A* is a family of variants of the A* search algorithm. Like other anytime algorithms, it has a flexible time cost, can return a valid solution to a pathfinding or graph traversal problem even if it is interrupted before it ends, by generating a fast, non-optimal solution before progressively optimizing it. This ability to quickly generate solutions has made it attractive to Search-base sites and AI designs.
LPA* or Lifelong Planning A* is an incremental heuristic search algorithm based on A*. It was first described by Sven Koenig and Maxim Likhachev in 2001.
