Doppler radio direction finding, also known as Doppler DF, is a radio direction-finding method that generates accurate bearing information with minimal electronics. It is best suited to applications in VHF and UHFfrequencies and takes only a short time to indicate a direction. This makes it suitable for measuring the location of the vast majority of commercial, amateur, and automated broadcasts. Doppler DF is one of the most widely used direction-finding techniques. Other direction-finding techniques are generally used only for fleeting signals or for longer or shorter wavelengths.
The Doppler DF system uses the Doppler effect to determine whether a moving receiver antenna is approaching or receding from the source. Early systems used antennas mounted on spinning disks to create this motion. In modern systems, the antennas are not moved physically but are instead oriented electronically, by rapidly switching between a set of several antennas. As long as the switching occurs rapidly, the Doppler effect will be strong enough to determine the direction of the signal. This variation is known as pseudo-Doppler DF, or sometimes sequential phase DF. This newer technique is so widely used that it is often the Doppler DF referred to in most references.[1]
Direction finding
Early radio direction finding (RDF) solutions used highly directional antennas with sharp "nulls" in the reception pattern.[2] The operator rotated the antenna, looking for points where the signal either reached a maximum or, more commonly, suddenly disappeared or 'nulled'. A common RDF antenna design is the loop antenna, which is simply a loop of wire with a small gap in the circle, typically arranged to rotate around the vertical axis with the gap at the bottom.[3] Some systems used dipole antennas instead of loops. Before the 1930s, radio signals were generally in the long wave spectrum. For effective reception of these signals, very large antennas are needed. Direction finding with rotating antennas is difficult at these wavelengths due to the required size of the antennas.[4][5]
A great advance in RDF technique was introduced in the form of the Bellini-Tosi direction finder (B-T) system, which replaced the rotation of the antenna with the rotation of a small coil of wire connected to two non-moving loop antennas. The loop antennas were similar to those used in earlier systems but fixed in position, set at right angles to each other to form a cross-shaped arrangement. Each antenna produced a different output whose relative strengths depend on how close the signal is to either antenna's null. These signals were sent to two coils of wire, the field coils, also arranged at right angles. These re-created the original signals in a much smaller space, about the size of a soda can. By rotating a small loop antenna, the sense coil, in the space between the two crossed field coils, DF could be performed. In effect, it recreated the traditional technique at a much smaller scale, allowing the main antennas to be built at any size.[6]
Robert Watson-Watt introduced the next major advance in direction finding, the high-frequency direction finding system, or HF/DF, also nicknamed "huff-duff". HF/DF also used crossing antennas, often an Adcock antenna,[7] but sent their output to the two channels of an oscilloscope. The relative strengths and phases of the two signals deflected the X and Y locations of the oscilloscope's electron beam by different amounts, causing an ellipse or figure-8 to appear on the screen, with the long axis indicating the direction of the signal.[8] The readout was essentially instantaneous and was able to easily detect even short transmissions. HF/DF was used in about one-quarter of all successful U-boat sinking.[9]
Both of these systems have drawbacks. The Bellini-Tosi system still has moving parts, albeit small ones, but has the more major limitation that it requires the operator to hunt for the signal, which may take several minutes. HF/DF provides a direct and immediate indication of the signal direction, but only at the cost of requiring an oscilloscope or similar display system with an equally fast response time. Both require two closely matched receivers and amplifiers, and often a third for the "sense" antenna if used.[10]
Doppler effect
If one places an antenna on a moving platform like the roof of a truck, the movement of the truck will cause the Doppler effect to shift the frequency of the signal upward as it moves towards the signal, or downward as it moves away. When the truck is driving at right angles to the signal, or not moving at all, there will be no shift.[11] If the truck is driven around a circular track, there will be times when it approaches the signal, moves away from it, or moves at right angles. This will produce a rising and falling frequency shift of the target signal, producing a frequency modulated (FM) signal known as the Doppler sine wave.[12] The FM signal has the same frequency as the rotational speed of the vehicle.[11][13]
The magnitude of the shift is a function of the wavelength of the signal and the angular velocity of the antenna:
S = rW/λ
Where S is the Doppler shift in frequency (Hz), r is the radius of the circle, W is the angular velocity in radians per second, λ is the target wavelength and c is the speed of light in meters per second.[13] Converting to more common units:
To convert Hz to radians per second, multiply by 6.28 (2π)
Where Fr is the frequency of rotation in Hz and Fc is the target frequency in MHz.[13][lower-alpha 1]
Consider the example of a truck hunting an FM radio station at 101.5 MHz, while driving around a 100 metres (330ft) wide pad (50 metres (160ft) radius) at 25 kilometres per hour (16mph). The circumference of the pad is 2π × 50 m or 314 m, and its velocity is 25 km/h = 25 × 1000 m/km / 60 h/min / 60 min/s ≈ 7m/s, so the truck completes one circuit in 314 / 7 = 45 s. Fr is therefore 1⁄45. Feeding that into the formula above, the frequency shift is:
S = 50 × 0.0222... × 101.8/ 48 = 2.4 Hz
This amount of frequency shift is too small to be accurately measured. To improve detection odds, r × W must be increased. For this reason, Doppler DF systems normally mount their antennas on a small disk that is spun at a high speed using an electric motor. Performing the same calculation using an antenna mounted to a disk with a diameter of 50 centimetres (20in) diameter spinning at 1000Hz results in:
S = .25 × 1000 × 101.8/ 48 = 530 Hz
Which is easily detected. Nevertheless, such a rotation speed, 60,000 rpm, demands high-precision systems. Because the antennas have to move at very high speeds, this technique is only really useful for higher frequency signals where the antennas can be shorter[lower-alpha 2] and the higher Fc produces a larger dividend.[13]
Early examples of Doppler DF systems date to at least 1941,[14] and they were used in the United Kingdom for hunting out German early warning radars, which operated at 250MHz in the 1.25-meter band. By 1943, examples were available that worked in the UHF region, used to find the German Würzburg radars operating at 560MHz.[15]
A significant advantage of this technique is that it requires only a single receiver, amplifier, and the appropriate FM demodulator. In contrast, HF/DF and B-T systems require two closely matched receivers, one for each antenna pair, and often a third for a sense channel.[7] Widespread civilian use of the technique did not start until the introduction of practical circuits for the quadrature detector and phase-locked loop, both introduced after the war, which greatly simplified the reception of FM signals. Its use roughly follows the spread of FM radio, which also used these techniques.[11]
Pseudo-Doppler
To further simplify the system, it is possible to simulate the movement of the antenna with a small amount of additional electronics. This is the pseudo-Doppler direction finding technique.[16]
Consider a pair of omnidirectional antennas receiving a signal from a target transmitter. As the signal propagates past the receiver, the amplitude of the signal at the antennas rises and falls. At long distances from the transmitter, well into the "far field", the wavefronts can be considered to be parallel.[17] If the two antennas are arranged perpendicularly to the target, the phase difference between them is zero, whereas if they are arranged parallel to the line, the phase difference will be a function of the distance between them and the wavelength of the signal.[17]
For this example, consider the two antennas to be located one quarter of the target wavelength apart and aligned parallel to it. If the two antennas were sampled instantaneously, the difference in phase between them would always be the same, 90°. But if one instead switches the input from one antenna to the other, there will always be some inherent delay, during which time the signal continues to move past the two antennas. In this case, if the original sample was taken when the peak of the wavefront was at the nearer antenna and the system then switched to the farther one, the phase difference would not be 90° but somewhat smaller, because the wavefront approached the second antenna during that time.[13]
Now consider a series of such antennas arranged around the circumference of a circle, and a switch that connects to the antennas in turn in a clockwise fashion. If the target signal is at the midnight position, then the phase shift will be increased when the switching is moving "forward" between the seven and eleven o'clock positions and reduced when moving "away", between one and five. When switching between antennas perpendicular to the line to the signal, eleven to one and five to seven, the shift will be a constant value.[13]
The signal from the antennas is sent into a single receiver, resulting in a series of pulses, whose amplitude depends on the phase at the instant of sampling. That signal is then smoothed to produce a sine wave.[18] That sine wave is modulated exactly as it would be in the case of a single moving antenna. In the case of the moving antenna, the frequency shifts because the antenna is moving through the wavefront as it passes, whereas, in the Pseudo-Doppler case, this is accomplished by timing the samples to simulate the movement of a single antenna. The direction to the target transmitter can then be determined in the same fashion as in the moving-antenna case, by comparing the phase of this signal to a reference signal. In this case, the reference is the clock signal triggering the switch.[13]
Because it has no moving parts and can be built using simple electronics, the pseudo-Doppler technique is very popular. Whilst not quite as fast as measuring the HF/DF system, in modern systems, the measurement is so rapid that there is little practical difference between the two techniques. Pseudo-Doppler has a significant advantage in that the antenna system is much simpler, using monopole antennas, and if the switching system is located on the antenna, only a single wire runs back to the receiver, and thus only one amplifier is required.[16] Because this technique is so widely used, it is often referred to simply as Doppler DF, the "Pseudo" rarely being added.[13]
The main disadvantage of the technique is the requirement for more signal processing. Because the "movement" in Pseudo-Doppler proceeds in steps, the resulting signal is not as smooth as it is in the case of a moving antenna. This results in a signal with considerable number of sidebands that have to be filtered out. The switching system also introduces electronic noise, further confusing the output.[19] Modern signal processing can easily reduce these effects to insignificance.[16]
Notes
↑ Moell was written in 1978 and uses inches for radius, resulting in a conversion constant of 1880, this has been converted to meters for modern readers by dividing by ~39 in/m.
↑ For a variety of reasons, radio antennas have to be about 1⁄2 the length of the wavelength they are trying to receive.
Related Research Articles
Radar is a system that uses radio waves to determine the distance (ranging), direction, and radial velocity of objects relative to the site. It is a radiodetermination method used to detect and track aircraft, ships, spacecraft, guided missiles, motor vehicles, map weather formations, and terrain.
A Doppler radar is a specialized radar that uses the Doppler effect to produce velocity data about objects at a distance. It does this by bouncing a microwave signal off a desired target and analyzing how the object's motion has altered the frequency of the returned signal. This variation gives direct and highly accurate measurements of the radial component of a target's velocity relative to the radar. The term applies to radar systems in many domains like aviation, police radar detectors, navigation, meteorology, etc.
Very low frequency or VLF is the ITU designation for radio frequencies (RF) in the range of 3–30 kHz, corresponding to wavelengths from 100 to 10 km, respectively. The band is also known as the myriameter band or myriameter wave as the wavelengths range from one to ten myriameters. Due to its limited bandwidth, audio (voice) transmission is highly impractical in this band, and therefore only low data rate coded signals are used. The VLF band is used for a few radio navigation services, government time radio stations and for secure military communication. Since VLF waves can penetrate at least 40 meters (131 ft) into saltwater, they are used for military communication with submarines.
Medium frequency (MF) is the ITU designation for radio frequencies (RF) in the range of 300 kilohertz (kHz) to 3 megahertz (MHz). Part of this band is the medium wave (MW) AM broadcast band. The MF band is also known as the hectometer band as the wavelengths range from ten to one hectometers. Frequencies immediately below MF are denoted as low frequency (LF), while the first band of higher frequencies is known as high frequency (HF). MF is mostly used for AM radio broadcasting, navigational radio beacons, maritime ship-to-shore communication, and transoceanic air traffic control.
In radio engineering, an antenna or aerial is an electronic device that converts an alternating electric current into radio waves, or radio waves into an electric current. It is the interface between radio waves propagating through space and electric currents moving in metal conductors, used with a transmitter or receiver. In transmission, a radio transmitter supplies an electric current to the antenna's terminals, and the antenna radiates the energy from the current as electromagnetic waves. In reception, an antenna intercepts some of the power of a radio wave in order to produce an electric current at its terminals, that is applied to a receiver to be amplified. Antennas are essential components of all radio equipment.
Very High Frequency Omnidirectional Range Station (VOR) is a type of short-range radio navigation system for aircraft, enabling aircraft with a receiving unit to determine its position and stay on course by receiving radio signals transmitted by a network of fixed ground radio beacons. It uses frequencies in the very high frequency (VHF) band from 108.00 to 117.95 MHz. Developed in the United States beginning in 1937 and deployed by 1946, VOR became the standard air navigational system in the world, used by both commercial and general aviation, until supplanted by satellite navigation systems such as GPS in the early 21st century. As such, VOR stations are being gradually decommissioned. In 2000 there were about 3,000 VOR stations operating around the world, including 1,033 in the US, but by 2013 the number in the US had been reduced to 967. The United States is decommissioning approximately half of its VOR stations and other legacy navigation aids as part of a move to performance-based navigation, while still retaining a "Minimum Operational Network" of VOR stations as a backup to GPS. In 2015, the UK planned to reduce the number of stations from 44 to 19 by 2020.
Direction finding (DF), or radio direction finding (RDF), is the use of radio waves to determine the direction to a radio source. The source may be a cooperating radio transmitter or may be an inadvertant source, a naturally-occurring radio source, or an illicit or enemy system. Radio direction finding differs from radar in that only the direction is determined by any one receiver; a radar system usually also gives a distance to the object of interest, as well as direction. By triangulation, the location of a radio source can be determined by measuring its direction from two or more locations. Radio direction finding is used in radio navigation for ships and aircraft, to locate emergency transmitters for search and rescue, for tracking wildlife, and to locate illegal or interfering transmitters. During the Second World War, radio direction finding was used by both sides to locate and direct aircraft, surface ships, and submarines.
The Beverage antenna or "wave antenna" is a long-wire receiving antenna mainly used in the low frequency and medium frequency radio bands, invented by Harold H. Beverage in 1921. It is used by amateur radio operators, shortwave listeners, longwave radio DXers and for military applications.
Earth–Moon–Earth communication (EME), also known as Moon bounce, is a radio communications technique that relies on the propagation of radio waves from an Earth-based transmitter directed via reflection from the surface of the Moon back to an Earth-based receiver.
A pulse-Doppler radar is a radar system that determines the range to a target using pulse-timing techniques, and uses the Doppler effect of the returned signal to determine the target object's velocity. It combines the features of pulse radars and continuous-wave radars, which were formerly separate due to the complexity of the electronics.
Continuous-wave radar is a type of radar system where a known stable frequency continuous wave radio energy is transmitted and then received from any reflecting objects. Individual objects can be detected using the Doppler effect, which causes the received signal to have a different frequency from the transmitted signal, allowing it to be detected by filtering out the transmitted frequency.
High-frequency direction finding, usually known by its abbreviation HF/DF or nickname huff-duff, is a type of radio direction finder (RDF) introduced in World War II. High frequency (HF) refers to a radio band that can effectively communicate over long distances; for example, between U-boats and their land-based headquarters. HF/DF was primarily used to catch enemy radios while they transmitted, although it was also used to locate friendly aircraft as a navigation aid. The basic technique remains in use as one of the fundamental disciplines of signals intelligence, although typically incorporated into a larger suite of radio systems and radars instead of being a stand-alone system.
A loop antenna is a radio antenna consisting of a loop or coil of wire, tubing, or other electrical conductor, that for transmitting is usually fed by a balanced power source or for receiving feeds a balanced load. Within this physical description there are two distinct types:
Bistatic radar is a radar system comprising a transmitter and receiver that are separated by a distance comparable to the expected target distance. Conversely, a conventional radar in which the transmitter and receiver are co-located is called a monostatic radar. A system containing multiple spatially diverse monostatic or bistatic radar components with a shared area of coverage is called multistatic radar. Many long-range air-to-air and surface-to-air missile systems use semi-active radar homing, which is a form of bistatic radar.
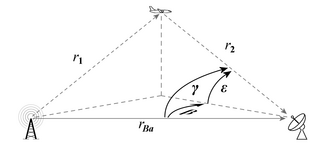
The UDOP multistatic radar and multiradar system (MSRS) utilizes Doppler radar for missile tracking and trajectory measurement. A target is illuminated at 450MHz. Five receiving stations, located along the baselines with the lengths from 40 to 120 km, receive signals from the target's transponder at 900MHz. These five stations yield slant-range rate. To compute the range or position, an initial position is required from some other tracking system. The random error is 6 cm (2.4 in), but total error includes the systematic error of 2.7 m (8.9 ft) plus the initial error. UDOP had relatively low cost compared with other high-accuracy systems. In the US, MSRS has found important application in the precision measurement of missile trajectories at the Air Force Eastern Test Range, which extends from the Florida mainland to the Indian Ocean. These MSRSs include the AZUSA, the MISTRAM, and the UDOP. All systems employ a cooperative beacon transponder on the observed target and a ground-based transmitting station with several receiving stations at separate, precisely located sites.
Coastal ocean dynamics applications radar (CODAR) is a type of portable, land-based, high frequency (HF) radar developed between 1973 and 1983 at NOAA's Wave Propagation Laboratory in Boulder, Colorado. CODAR is a noninvasive system that can measure and map near-surface ocean currents in coastal waters. It is transportable and can produce ocean current maps on site in near real time. Moreover, using CODAR it is possible to measure wave heights and produce an indirect estimate of local wind direction.
The Unified S-band (USB) system is a tracking and communication system developed for the Apollo program by NASA and the Jet Propulsion Laboratory (JPL). It operated in the S band portion of the microwave spectrum, unifying voice communications, television, telemetry, command, tracking and ranging into a single system to save size and weight and simplify operations. The USB ground network was managed by the Goddard Space Flight Center (GSFC). Commercial contractors included Collins Radio, Blaw-Knox, Motorola and Energy Systems.
Sonne was a radio navigation system developed in Germany during World War II. It was developed from an earlier experimental system known as Elektra, and therefore the system is also known as Elektra-sonnen. When the British learned of the system they started using it as well, under the name Consol, meaning "by the sun".
A Bellini–Tosi direction finder is a type of radio direction finder (RDF), which determines the direction to, or bearing of, a radio transmitter. Earlier RDF systems used very large rotating loop antennas, which the B–T system replaced with two fixed antennae and a small rotating loop, known as a radiogoniometer. This made RDF much more practical, especially on large vehicles like ships or when using very long wavelengths that demand large antennae.
In radio systems, many different antenna types are used whose properties are especially crafted for particular applications.
Sadler, David (25 February 2010). HF Radio Direction Finding(PDF) (Technical report). Roke Manor Research. Archived from the original(PDF) on 9 August 2017.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.