Related Research Articles

In mathematics, a diffeomorphism is an isomorphism of smooth manifolds. It is an invertible function that maps one differentiable manifold to another such that both the function and its inverse are smooth.
In differential geometry, a Riemannian manifold or Riemannian space(M, g) is a real, smooth manifold M equipped with a positive-definite inner product gp on the tangent space TpM at each point p. A common convention is to take g to be smooth, which means that for any smooth coordinate chart (U,x) on M, the n2 functions

Riemannian geometry is the branch of differential geometry that studies Riemannian manifolds, smooth manifolds with a Riemannian metric, i.e. with an inner product on the tangent space at each point that varies smoothly from point to point. This gives, in particular, local notions of angle, length of curves, surface area and volume. From those, some other global quantities can be derived by integrating local contributions.

In mathematics, hyperbolic geometry is a non-Euclidean geometry. The parallel postulate of Euclidean geometry is replaced with:

In mathematics, the open unit disk around P, is the set of points whose distance from P is less than 1:
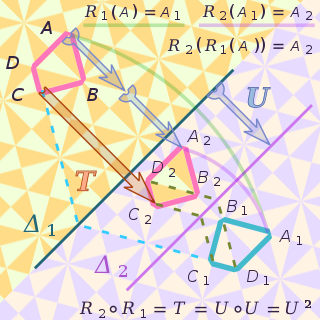
In mathematics, an isometry is a distance-preserving transformation between metric spaces, usually assumed to be bijective.

In Riemannian geometry, an exponential map is a map from a subset of a tangent space TpM of a Riemannian manifold M to M itself. The (pseudo) Riemannian metric determines a canonical affine connection, and the exponential map of the (pseudo) Riemannian manifold is given by the exponential map of this connection.
In mathematics, conformal geometry is the study of the set of angle-preserving (conformal) transformations on a space.

In mathematics, a hyperbolic space is a homogeneous space that has a constant negative curvature, where in this case the curvature is the sectional curvature. It is hyperbolic geometry in more than 2 dimensions, and is distinguished from Euclidean spaces with zero curvature that define the Euclidean geometry, and elliptic geometry that have a constant positive curvature.

In non-Euclidean geometry, the Poincaré half-plane model is the upper half-plane, denoted below as H, together with a metric, the Poincaré metric, that makes it a model of two-dimensional hyperbolic geometry.
This is a glossary of some terms used in Riemannian geometry and metric geometry — it doesn't cover the terminology of differential topology.

In mathematics, low-dimensional topology is the branch of topology that studies manifolds, or more generally topological spaces, of four or fewer dimensions. Representative topics are the structure theory of 3-manifolds and 4-manifolds, knot theory, and braid groups. This can be regarded as a part of geometric topology. It may also be used to refer to the study of topological spaces of dimension 1, though this is more typically considered part of continuum theory.
In differential geometry, the Laplace–Beltrami operator is a generalization of the Laplace operator to functions defined on submanifolds in Euclidean space and, even more generally, on Riemannian and pseudo-Riemannian manifolds. It is named after Pierre-Simon Laplace and Eugenio Beltrami.
In mathematics, the Schoen–Yau conjecture is a disproved conjecture in hyperbolic geometry, named after the mathematicians Richard Schoen and Shing-Tung Yau.

In mathematics, a quasi-isometry is a function between two metric spaces that respects large-scale geometry of these spaces and ignores their small-scale details. Two metric spaces are quasi-isometric if there exists a quasi-isometry between them. The property of being quasi-isometric behaves like an equivalence relation on the class of metric spaces.

In mathematics, the differential geometry of surfaces deals with the differential geometry of smooth surfaces with various additional structures, most often, a Riemannian metric. Surfaces have been extensively studied from various perspectives: extrinsically, relating to their embedding in Euclidean space and intrinsically, reflecting their properties determined solely by the distance within the surface as measured along curves on the surface. One of the fundamental concepts investigated is the Gaussian curvature, first studied in depth by Carl Friedrich Gauss, who showed that curvature was an intrinsic property of a surface, independent of its isometric embedding in Euclidean space.
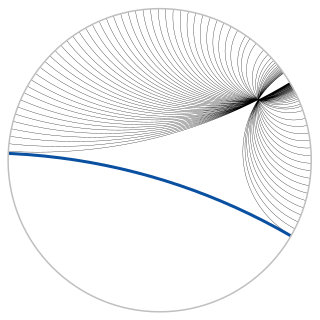
In geometry, the Poincaré disk model, also called the conformal disk model, is a model of 2-dimensional hyperbolic geometry in which the points of the geometry are inside the unit disk, and the straight lines consist of all circular arcs contained within that disk that are orthogonal to the boundary of the disk, plus all diameters of the disk.

In mathematics, the Riemann sphere, named after Bernhard Riemann, is a model of the extended complex plane, the complex plane plus a point at infinity. This extended plane represents the extended complex numbers, that is, the complex numbers plus a value ∞ for infinity. With the Riemann model, the point "∞" is near to very large numbers, just as the point "0" is near to very small numbers.

In geometry, a motion is an isometry of a metric space. For instance, a plane equipped with the Euclidean distance metric is a metric space in which a mapping associating congruent figures is a motion. More generally, the term motion is a synonym for surjective isometry in metric geometry, including elliptic geometry and hyperbolic geometry. In the latter case, hyperbolic motions provide an approach to the subject for beginners.
In geometry, if X is a manifold with an action of a topological group G by analytical diffeomorphisms, the notion of a (G, X)-structure on a topological space is a way to formalise it being locally isomorphic to X with its G-invariant structure; spaces with a -structures are always manifolds and are called (G, X)-manifolds. This notion is often used with G being a Lie group and X a homogeneous space for G. Foundational examples are hyperbolic manifolds and affine manifolds.
References
- Ambartzumian, R. V. (1982). Combinatorial integral geometry. Wiley Series in Probability and Mathematical Statistics: Tracts on Probability and Statistics. New York: John Wiley & Sons Inc. pp. xvii+221. ISBN 0-471-27977-3. MR 0679133.
- Kreyszig, Erwin (1991). Differential geometry. New York: Dover Publications Inc. pp. xiv+352. ISBN 0-486-66721-9. MR 1118149.