Distributed computing is a field of computer science that studies distributed systems. A distributed system is a system whose components are located on different networked computers, which communicate and coordinate their actions by passing messages to one another from any system. The components interact with one another in order to achieve a common goal. Three significant characteristics of distributed systems are: concurrency of components, lack of a global clock, and independent failure of components. It deals with a central challenge that, when components of a system fails, it doesn't imply the entire system fails. Examples of distributed systems vary from SOA-based systems to massively multiplayer online games to peer-to-peer applications.

Network topology is the arrangement of the elements of a communication network. Network topology can be used to define or describe the arrangement of various types of telecommunication networks, including command and control radio networks, industrial fieldbusses and computer networks.
In geometry, a torus is a surface of revolution generated by revolving a circle in three-dimensional space about an axis that is coplanar with the circle.
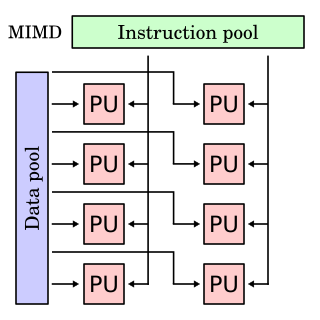
In computing, MIMD is a technique employed to achieve parallelism. Machines using MIMD have a number of processors that function asynchronously and independently. At any time, different processors may be executing different instructions on different pieces of data.
Toroidal describes something which resembles or relates to a torus or toroid:

The snake-in-the-box problem in graph theory and computer science deals with finding a certain kind of path along the edges of a hypercube. This path starts at one corner and travels along the edges to as many corners as it can reach. After it gets to a new corner, the previous corner and all of its neighbors must be marked as unusable. The path should never travel to a corner which has been marked unusable.
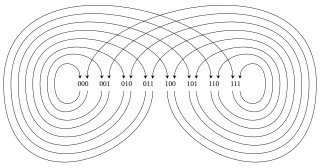
In graph theory, an -dimensional De Bruijn graph of symbols is a directed graph representing overlaps between sequences of symbols. It has vertices, consisting of all possible length- sequences of the given symbols; the same symbol may appear multiple times in a sequence. For a set of symbols , the set of vertices is:
In computer networking, if the network is bisected into two partitions, the bisection bandwidth of a network topology is the bandwidth available between the two partitions. Bisection should be done in such a way that the bandwidth between two partitions is minimum. Bisection bandwidth gives the true bandwidth available in the entire system. Bisection bandwidth accounts for the bottleneck bandwidth of the entire network. Therefore bisection bandwidth represents bandwidth characteristics of the network better than any other metric.

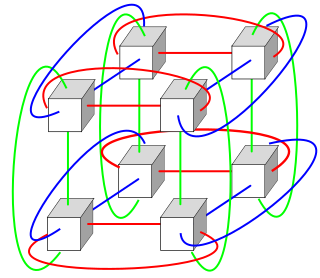
In graph theory, the hypercube graphQn is the graph formed from the vertices and edges of an n-dimensional hypercube. For instance, the cubical graph Q3 is the graph formed by the 8 vertices and 12 edges of a three-dimensional cube. Qn has 2n vertices, 2n−1n edges, and is a regular graph with n edges touching each vertex.
In distributed computing, leader election is the process of designating a single process as the organizer of some task distributed among several computers (nodes). Before the task has begun, all network nodes are either unaware which node will serve as the "leader" of the task, or unable to communicate with the current coordinator. After a leader election algorithm has been run, however, each node throughout the network recognizes a particular, unique node as the task leader.

In graph theory, the cube-connected cycles is an undirected cubic graph, formed by replacing each vertex of a hypercube graph by a cycle. It was introduced by Preparata & Vuillemin (1981) for use as a network topology in parallel computing.
In peer-to-peer networks, Koorde is a distributed hash table (DHT) system based on the Chord DHT and the De Bruijn graph. Inheriting the simplicity of Chord, Koorde meets O(log n) hops per node, and O(log n/ log log n) hops per lookup request with O(log n) neighbors per node.
Multistage interconnection networks (MINs) are a class of high-speed computer networks usually composed of processing elements (PEs) on one end of the network and memory elements (MEs) on the other end, connected by switching elements (SEs). The switching elements themselves are usually connected to each other in stages, hence the name.
The topology of an electronic circuit is the form taken by the network of interconnections of the circuit components. Different specific values or ratings of the components are regarded as being the same topology. Topology is not concerned with the physical layout of components in a circuit, nor with their positions on a circuit diagram; similarly to the mathematic concept of topology, it is only concerned with what connections exist between the components. There may be numerous physical layouts and circuit diagrams that all amount to the same topology.

In graph theory, a folded cube graph is an undirected graph formed from a hypercube graph by adding to it a perfect matching that connects opposite pairs of hypercube vertices.
A torus interconnect is a switch-less network topology for connecting processing nodes in a parallel computer system.
In mathematics, the queue number of a graph is a graph invariant defined analogously to stack number using first-in first-out (queue) orderings in place of last-in first-out (stack) orderings.

In computer networking, hypercube networks are a type of network topology used to connect multiple processors with memory modules and accurately route data. Hypercube networks consist of 2m nodes, which form the vertices of squares to create an internetwork connection. A hypercube is basically a multidimensional mesh network with two nodes in each dimension. Due to similarity, such topologies are usually grouped into a k-ary d-dimensional mesh topology family, where d represents the number of dimensions and k represents the number of nodes in each dimension.

A butterfly network is a technique to link multiple computers into a high-speed network. This form of multistage interconnection network topology can be used to connect different nodes in a multiprocessor system. The interconnect network for a shared memory multiprocessor system must have low latency and high bandwidth unlike other network systems, like local area networks (LANs) or internet for three reasons:
In graph theory, the shuffle-exchange network is an undirected cubic multigraph, whose vertices represent binary sequences of a given length and whose edges represent two operations on these sequence, circular shifts and flipping the lowest-order bit.
