
In mechanics, acceleration is the rate of change of the velocity of an object with respect to time. Accelerations are vector quantities. The orientation of an object's acceleration is given by the orientation of the net force acting on that object. The magnitude of an object's acceleration, as described by Newton's Second Law., is the combined effect of two causes:

In physics, jerk or jolt is the rate at which an object's acceleration changes with respect to time. It is a vector quantity. Jerk is commonly denoted by the symbol and expressed in m/s3 or standard gravities per second (g/s).

In physics, equations of motion are equations that describe the behavior of a physical system in terms of its motion as a function of time. More specifically, the equations of motion describe the behaviour of a physical system as a set of mathematical functions in terms of dynamic variables. These variables are usually spatial coordinates and time, but may include momentum components. The most general choice are generalized coordinates which can be any convenient variables characteristic of the physical system. The functions are defined in a Euclidean space in classical mechanics, but are replaced by curved spaces in relativity. If the dynamics of a system is known, the equations are the solutions for the differential equations describing the motion of the dynamics.
Kinematics is a subfield of classical mechanics that describes the motion of points, bodies (objects), and systems of bodies without considering the forces that cause them to move. Kinematics, as a field of study, is often referred to as the "geometry of motion" and is occasionally seen as a branch of mathematics. A kinematics problem begins by describing the geometry of the system and declaring the initial conditions of any known values of position, velocity and/or acceleration of points within the system. Then, using arguments from geometry, the position, velocity and acceleration of any unknown parts of the system can be determined. The study of how forces act on bodies falls within kinetics, not kinematics. For further details, see analytical dynamics.

Rigid-body dynamics studies the movement of systems of interconnected bodies under the action of external forces. The assumption that the bodies are rigid, which means that they do not deform under the action of applied forces, simplifies the analysis by reducing the parameters that describe the configuration of the system to the translation and rotation of reference frames attached to each body. This excludes bodies that display fluid, highly elastic, and plastic behavior.
In physics, circular motion is a movement of an object along the circumference of a circle or rotation along a circular path. It can be uniform, with constant angular rate of rotation and constant speed, or non-uniform with a changing rate of rotation. The rotation around a fixed axis of a three-dimensional body involves circular motion of its parts. The equations of motion describe the movement of the center of mass of a body.
Verlet integration is a numerical method used to integrate Newton's equations of motion. It is frequently used to calculate trajectories of particles in molecular dynamics simulations and computer graphics. The algorithm was first used in 1791 by Delambre and has been rediscovered many times since then, most recently by Loup Verlet in the 1960s for use in molecular dynamics. It was also used by Cowell and Crommelin in 1909 to compute the orbit of Halley's Comet, and by Carl Størmer in 1907 to study the trajectories of electrical particles in a magnetic field . The Verlet integrator provides good numerical stability, as well as other properties that are important in physical systems such as time reversibility and preservation of the symplectic form on phase space, at no significant additional computational cost over the simple Euler method.
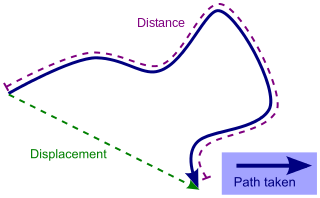
In geometry, a displacement is a vector whose length is the shortest distance from the initial to the final position of a point P undergoing motion. It quantifies both the distance and direction of the net or total motion along a straight line from the initial position to the final position of the point trajectory. A displacement may be identified with the translation that maps the initial position to the final position.

Projectile motion is a form of motion experienced by an object or particle that is projected near the Earth's surface and moves along a curved path under the action of gravity only. This curved path was shown by Galileo to be a parabola. The study of such motions is called ballistics, and such a trajectory is a ballistic trajectory. The only force of significance that acts on the object is gravity, which acts downward, thus imparting to the object a downward acceleration. Because of the object's inertia, no external horizontal force is needed to maintain the horizontal velocity component of the object. Taking other forces into account, such as friction from aerodynamic drag or internal propulsion such as in a rocket, requires additional analysis. A ballistic missile is a missile only guided during the relatively brief initial powered phase of flight, and whose subsequent course is governed by the laws of classical mechanics.

A rotating frame of reference is a special case of a non-inertial reference frame that is rotating relative to an inertial reference frame. An everyday example of a rotating reference frame is the surface of the Earth.
A numerical model of the Solar System is a set of mathematical equations, which, when solved, give the approximate positions of the planets as a function of time. Attempts to create such a model established the more general field of celestial mechanics. The results of this simulation can be compared with past measurements to check for accuracy and then be used to predict future positions. Its main use therefore is in preparation of almanacs.
A time derivative is a derivative of a function with respect to time, usually interpreted as the rate of change of the value of the function. The variable denoting time is usually written as .

In mechanics, the derivative of the position vs. time graph of an object is equal to the velocity of the object. In the International System of Units, the position of the moving object is measured in meters relative to the origin, while the time is measured in seconds. Placing position on the y-axis and time on the x-axis, the slope of the curve is given by:
The relative velocity is the velocity of an object or observer B in the rest frame of another object or observer A.
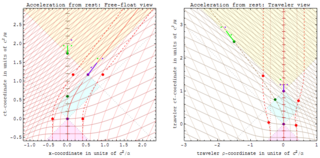
In relativity theory, proper acceleration is the physical acceleration experienced by an object. It is thus acceleration relative to a free-fall, or inertial, observer who is momentarily at rest relative to the object being measured. Gravitation therefore does not cause proper acceleration, since gravity acts upon the inertial observer that any proper acceleration must depart from. A corollary is that all inertial observers always have a proper acceleration of zero.
Linear motion is a one-dimensional motion along a straight line, and can therefore be described mathematically using only one spatial dimension. The linear motion can be of two types: uniform linear motion with constant velocity or zero acceleration; non uniform linear motion with variable velocity or non-zero acceleration. The motion of a particle along a line can be described by its position , which varies with (time). An example of linear motion is an athlete running 100m along a straight track.
The magnetic radiation reaction force is a force on an electromagnet when its magnetic moment changes. One can derive an electric radiation reaction force for an accelerating charged particle caused by the particle emitting electromagnetic radiation. Likewise, a magnetic radiation reaction force can be derived for an accelerating magnetic moment emitting electromagnetic radiation.
In physics, pop is the sixth derivative of the position vector with respect to time, with the first, second, third, fourth, and fifth derivatives being velocity, acceleration, jerk, snap, and crackle, respectively; pop is thus the rate of change of the crackle with respect to time. Pop is defined by any of the following equivalent expressions:















