The wave equation is a second-order linear partial differential equation for the description of waves or standing wave fields such as mechanical waves or electromagnetic waves. It arises in fields like acoustics, electromagnetism, and fluid dynamics.
In particle physics, the Dirac equation is a relativistic wave equation derived by British physicist Paul Dirac in 1928. In its free form, or including electromagnetic interactions, it describes all spin-1/2 massive particles, called "Dirac particles", such as electrons and quarks for which parity is a symmetry. It is consistent with both the principles of quantum mechanics and the theory of special relativity, and was the first theory to account fully for special relativity in the context of quantum mechanics. It was validated by accounting for the fine structure of the hydrogen spectrum in a completely rigorous way. It has become vital in the building of the Standard Model.

The Navier–Stokes equations are partial differential equations which describe the motion of viscous fluid substances. They were named after French engineer and physicist Claude-Louis Navier and the Irish physicist and mathematician George Gabriel Stokes. They were developed over several decades of progressively building the theories, from 1822 (Navier) to 1842–1850 (Stokes).
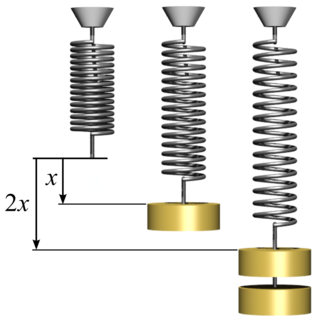
In physics, Hooke's law is an empirical law which states that the force needed to extend or compress a spring by some distance scales linearly with respect to that distance—that is, Fs = kx, where k is a constant factor characteristic of the spring, and x is small compared to the total possible deformation of the spring. The law is named after 17th-century British physicist Robert Hooke. He first stated the law in 1676 as a Latin anagram. He published the solution of his anagram in 1678 as: ut tensio, sic vis. Hooke states in the 1678 work that he was aware of the law since 1660.

In physics and mathematics, the Lorentz group is the group of all Lorentz transformations of Minkowski spacetime, the classical and quantum setting for all (non-gravitational) physical phenomena. The Lorentz group is named for the Dutch physicist Hendrik Lorentz.
Linear elasticity is a mathematical model as to how solid objects deform and become internally stressed by prescribed loading conditions. It is a simplification of the more general nonlinear theory of elasticity and a branch of continuum mechanics.
The Feynman–Kac formula, named after Richard Feynman and Mark Kac, establishes a link between parabolic partial differential equations and stochastic processes. In 1947, when Kac and Feynman were both faculty members at Cornell University, Kac attended a presentation of Feynman's and remarked that the two of them were working on the same thing from different directions. The Feynman–Kac formula resulted, which proves rigorously the real-valued case of Feynman's path integrals. The complex case, which occurs when a particle's spin is included, is still an open question.

In quantum mechanics and quantum field theory, the propagator is a function that specifies the probability amplitude for a particle to travel from one place to another in a given period of time, or to travel with a certain energy and momentum. In Feynman diagrams, which serve to calculate the rate of collisions in quantum field theory, virtual particles contribute their propagator to the rate of the scattering event described by the respective diagram. Propagators may also be viewed as the inverse of the wave operator appropriate to the particle, and are, therefore, often called (causal) Green's functions.
In physics, the Hamilton–Jacobi equation, named after William Rowan Hamilton and Carl Gustav Jacob Jacobi, is an alternative formulation of classical mechanics, equivalent to other formulations such as Newton's laws of motion, Lagrangian mechanics and Hamiltonian mechanics.
In differential geometry, the four-gradient is the four-vector analogue of the gradient from vector calculus.
In seismology and other areas involving elastic waves, S waves, secondary waves, or shear waves are a type of elastic wave and are one of the two main types of elastic body waves, so named because they move through the body of an object, unlike surface waves.
In fluid dynamics, Couette flow is the flow of a viscous fluid in the space between two surfaces, one of which is moving tangentially relative to the other. The relative motion of the surfaces imposes a shear stress on the fluid and induces flow. Depending on the definition of the term, there may also be an applied pressure gradient in the flow direction.
In physics, the Majorana equation is a relativistic wave equation. It is named after the Italian physicist Ettore Majorana, who proposed it in 1937 as a means of describing fermions that are their own antiparticle. Particles corresponding to this equation are termed Majorana particles, although that term now has a more expansive meaning, referring to any fermionic particle that is its own anti-particle.
A theoretical motivation for general relativity, including the motivation for the geodesic equation and the Einstein field equation, can be obtained from special relativity by examining the dynamics of particles in circular orbits about the Earth. A key advantage in examining circular orbits is that it is possible to know the solution of the Einstein Field Equation a priori. This provides a means to inform and verify the formalism.
The derivation of the Navier–Stokes equations as well as their application and formulation for different families of fluids, is an important exercise in fluid dynamics with applications in mechanical engineering, physics, chemistry, heat transfer, and electrical engineering. A proof explaining the properties and bounds of the equations, such as Navier–Stokes existence and smoothness, is one of the important unsolved problems in mathematics.
In the differential geometry of surfaces, a Darboux frame is a natural moving frame constructed on a surface. It is the analog of the Frenet–Serret frame as applied to surface geometry. A Darboux frame exists at any non-umbilic point of a surface embedded in Euclidean space. It is named after French mathematician Jean Gaston Darboux.
Vasiliev equations are formally consistent gauge invariant nonlinear equations whose linearization over a specific vacuum solution describes free massless higher-spin fields on anti-de Sitter space. The Vasiliev equations are classical equations and no Lagrangian is known that starts from canonical two-derivative Frønsdal Lagrangian and is completed by interactions terms. There is a number of variations of Vasiliev equations that work in three, four and arbitrary number of space-time dimensions. Vasiliev's equations admit supersymmetric extensions with any number of super-symmetries and allow for Yang–Mills gaugings. Vasiliev's equations are background independent, the simplest exact solution being anti-de Sitter space. It is important to note that locality is not properly implemented and the equations give a solution of certain formal deformation procedure, which is difficult to map to field theory language. The higher-spin AdS/CFT correspondence is reviewed in Higher-spin theory article.
The variational multiscale method (VMS) is a technique used for deriving models and numerical methods for multiscale phenomena. The VMS framework has been mainly applied to design stabilized finite element methods in which stability of the standard Galerkin method is not ensured both in terms of singular perturbation and of compatibility conditions with the finite element spaces.
Tau functions are an important ingredient in the modern mathematical theory of integrable systems, and have numerous applications in a variety of other domains. They were originally introduced by Ryogo Hirota in his direct method approach to soliton equations, based on expressing them in an equivalent bilinear form.

Critical embankment velocity or critical speed, in transportation engineering, is the velocity value of the upper moving vehicle that causes the severe vibration of the embankment and the nearby ground. This concept and the prediction method was put forward by scholars in civil engineering communities before 1980 and stressed and exhaustively studied by Krylov in 1994 based on the Green function method and predicted more accurately using other methods in the following. When the vehicles such as high-speed trains or airplanes move approaching or beyond this critical velocity, the vibration magnitudes of vehicles and nearby ground increase rapidly and possibly lead to the damage to the passengers and the neighboring residents. This relevant unexpected phenomenon is called the ground vibration boom from 1997 when it was observed in Sweden for the first time.

























