| This article needs attention from an expert in mathematics. The specific problem is: There may be logic or math errors, complicated by the fact that this article was translated from a German original. See the talk page for details.(May 2017) |
| Part of a series on |
| Graphical projection |
|---|
 |
Axonometry is a graphical procedure belonging to descriptive geometry that generates a planar image of a three-dimensional object. The term "axonometry" means "to measure along axes", and indicates that the dimensions and scaling of the coordinate axes play a crucial role. The result of an axonometric procedure is a uniformly-scaled parallel projection of the object. In general, the resulting parallel projection is oblique (the rays are not perpendicular to the image plane); but in special cases the result is orthographic (the rays are perpendicular to the image plane), which in this context is called an orthogonal axonometry.
Contents
- Principle of axonometry
- The choice of the images of the axes and the foreshortenings
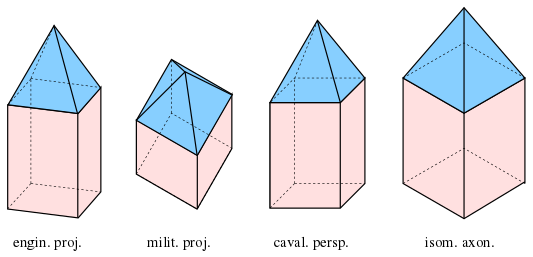
- Special axonometries
- Engineer projection
- Cavalier perspective, cabinet perspective
- Birds eye view, military projection
- Isometric axonometry
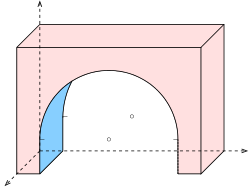
- Circles in axonometry
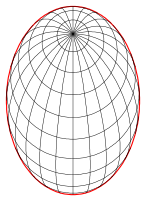
- Spheres in axonometry
- Coordinate calculation
- Examples
- References
- External links
In technical drawing and in architecture, axonometric perspective is a form of two-dimensional representation of three-dimensional objects whose goal is to preserve the impression of volume or relief. Sometimes also called rapid perspective or artificial perspective, it differs from conical perspective and does not represent what the eye actually sees: in particular parallel lines remain parallel and distant objects are not reduced in size. It can be considered a conical perspective conique whose center has been pushed out to infinity, i.e. very far from the object observed.
The term axonometry is used both for the graphical procedure described below, as well as the image produced by this procedure.
Axonometry should not be confused with axonometric projection , which in English literature usually refers to orthogonal axonometry.