Euclidean space is the fundamental space of geometry, intended to represent physical space. Originally, that is, in Euclid's Elements, it was the three-dimensional space of Euclidean geometry, but in modern mathematics there are Euclidean spaces of any positive integer dimension n, which are called Euclidean n-spaces when one wants to specify their dimension. For n equal to one or two, they are commonly called respectively Euclidean lines and Euclidean planes. The qualifier "Euclidean" is used to distinguish Euclidean spaces from other spaces that were later considered in physics and modern mathematics.

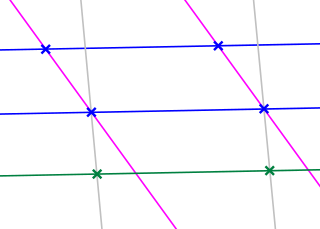
In mathematics, a projective plane is a geometric structure that extends the concept of a plane. In the ordinary Euclidean plane, two lines typically intersect at a single point, but there are some pairs of lines that do not intersect. A projective plane can be thought of as an ordinary plane equipped with additional "points at infinity" where parallel lines intersect. Thus any two distinct lines in a projective plane intersect at exactly one point.

In mathematics, the concept of a projective space originated from the visual effect of perspective, where parallel lines seem to meet at infinity. A projective space may thus be viewed as the extension of a Euclidean space, or, more generally, an affine space with points at infinity, in such a way that there is one point at infinity of each direction of parallel lines.

In mathematics, projective geometry is the study of geometric properties that are invariant with respect to projective transformations. This means that, compared to elementary Euclidean geometry, projective geometry has a different setting, projective space, and a selective set of basic geometric concepts. The basic intuitions are that projective space has more points than Euclidean space, for a given dimension, and that geometric transformations are permitted that transform the extra points to Euclidean points, and vice-versa.
In mathematics, affine geometry is what remains of Euclidean geometry when ignoring the metric notions of distance and angle.
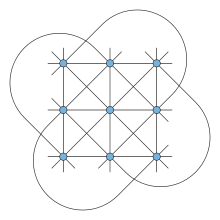
A finite geometry is any geometric system that has only a finite number of points. The familiar Euclidean geometry is not finite, because a Euclidean line contains infinitely many points. A geometry based on the graphics displayed on a computer screen, where the pixels are considered to be the points, would be a finite geometry. While there are many systems that could be called finite geometries, attention is mostly paid to the finite projective and affine spaces because of their regularity and simplicity. Other significant types of finite geometry are finite Möbius or inversive planes and Laguerre planes, which are examples of a general type called Benz planes, and their higher-dimensional analogs such as higher finite inversive geometries.
Synthetic geometry is geometry without the use of coordinates. It relies on the axiomatic method for proving all results from a few basic properties initially called postulate, and at present called axioms.

In mathematics, an affine space is a geometric structure that generalizes some of the properties of Euclidean spaces in such a way that these are independent of the concepts of distance and measure of angles, keeping only the properties related to parallelism and ratio of lengths for parallel line segments.
In geometry, a striking feature of projective planes is the symmetry of the roles played by points and lines in the definitions and theorems, and (plane) duality is the formalization of this concept. There are two approaches to the subject of duality, one through language and the other a more functional approach through special mappings. These are completely equivalent and either treatment has as its starting point the axiomatic version of the geometries under consideration. In the functional approach there is a map between related geometries that is called a duality. Such a map can be constructed in many ways. The concept of plane duality readily extends to space duality and beyond that to duality in any finite-dimensional projective geometry.

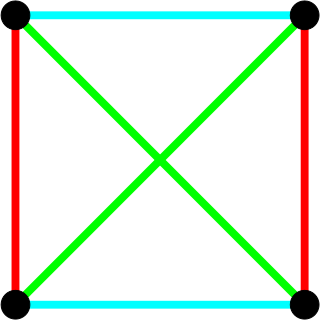
In mathematics, an incidence structure is an abstract system consisting of two types of objects and a single relationship between these types of objects. Consider the points and lines of the Euclidean plane as the two types of objects and ignore all the properties of this geometry except for the relation of which points are on which lines for all points and lines. What is left is the incidence structure of the Euclidean plane.
In geometry, a line is an infinitely long object with no width, depth, or curvature. Thus, lines are one-dimensional objects, though they may exist embedded in two, three, or higher dimensional spaces. The word line may also refer to a line segment in everyday life that has two points to denote its ends (endpoints). A line can be referred to by two points that lie on it or by a single letter.
In mathematics, incidence geometry is the study of incidence structures. A geometric structure such as the Euclidean plane is a complicated object that involves concepts such as length, angles, continuity, betweenness, and incidence. An incidence structure is what is obtained when all other concepts are removed and all that remains is the data about which points lie on which lines. Even with this severe limitation, theorems can be proved and interesting facts emerge concerning this structure. Such fundamental results remain valid when additional concepts are added to form a richer geometry. It sometimes happens that authors blur the distinction between a study and the objects of that study, so it is not surprising to find that some authors refer to incidence structures as incidence geometries.
In mathematics, a translation plane is a projective plane which admits a certain group of symmetries. Along with the Hughes planes and the Figueroa planes, translation planes are among the most well-studied of the known non-Desarguesian planes, and the vast majority of known non-Desarguesian planes are either translation planes, or can be obtained from a translation plane via successive iterations of dualization and/or derivation.
A maximal arc in a finite projective plane is a largest possible (k,d)-arc in that projective plane. If the finite projective plane has order q (there are q+1 points on any line), then for a maximal arc, k, the number of points of the arc, is the maximum possible (= qd + d - q) with the property that no d+1 points of the arc lie on the same line.
Geometric Algebra is a book written by Emil Artin and published by Interscience Publishers, New York, in 1957. It was republished in 1988 in the Wiley Classics series (ISBN 0-471-60839-4).
In mathematics, a Hall plane is a non-Desarguesian projective plane constructed by Marshall Hall Jr. (1943). There are examples of order p2n for every prime p and every positive integer n provided p2n > 4.

In mathematics, a Laguerre plane is one of the three types of Benz plane, which are the Möbius plane, Laguerre plane and Minkowski plane. Laguerre planes are named after the French mathematician Edmond Nicolas Laguerre.
In mathematics, the classical Möbius plane is the Euclidean plane supplemented by a single point at infinity. It is also called the inversive plane because it is closed under inversion with respect to any generalized circle, and thus a natural setting for planar inversive geometry.
In geometry, specifically projective geometry, a blocking set is a set of points in a projective plane that every line intersects and that does not contain an entire line. The concept can be generalized in several ways. Instead of talking about points and lines, one could deal with n-dimensional subspaces and m-dimensional subspaces, or even more generally, objects of type 1 and objects of type 2 when some concept of intersection makes sense for these objects. A second way to generalize would be to move into more abstract settings than projective geometry. One can define a blocking set of a hypergraph as a set that meets all edges of the hypergraph.
In geometry, a unital is a set of n3 + 1 points arranged into subsets of size n + 1 so that every pair of distinct points of the set are contained in exactly one subset. This is equivalent to saying that a unital is a 2-(n3 + 1, n + 1, 1) block design. Some unitals may be embedded in a projective plane of order n2 (the subsets of the design become sets of collinear points in the projective plane). In this case of embedded unitals, every line of the plane intersects the unital in either 1 or n + 1 points. In the Desarguesian planes, PG(2,q2), the classical examples of unitals are given by nondegenerate Hermitian curves. There are also many non-classical examples. The first and the only known unital with non prime power parameters, n=6, was constructed by Bhaskar Bagchi and Sunanda Bagchi. It is still unknown if this unital can be embedded in a projective plane of order 36, if such a plane exists.