Related Research Articles

A humanoid robot is a robot resembling the human body in shape. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some humanoid robots may replicate only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans.

Cog was a project at the Humanoid Robotics Group of the Massachusetts Institute of Technology. It was based on the hypothesis that human-level intelligence requires gaining experience from interacting with humans, like human infants do. This in turn required many interactions with humans over a long period. Because Cog's behavior responded to what humans would consider appropriate and socially salient environmental stimuli, the robot was expected to act more human. This behavior also provided the robot with a better context for deciphering and imitating human behavior. This was intended to allow the robot to learn socially, as humans do.
GuRoo is a humanoid robot developed at the Mobile Robotics Laboratory in the School of Information Technology and Electrical Engineering at the University of Queensland. The design of the GuRoo is based on the human form and it is kept as anthropomorphic as possible. GuRoo is completely autonomous. It is used for research in different areas including dynamic stability, human-robot interaction and machine learning. GuRoo competes in the annual RoboCup. The goal of this competition is to foster the development of robotics through an annual soccer competition. It is the dream of the RoboCup federation to develop a team of fully autonomous humanoid robots, to play against and beat the human team that wins the World Cup in the year 2050.
Robot locomotion is the collective name for the various methods that robots use to transport themselves from place to place.
Domo is an experimental robot made by MIT designed to interact with humans. The brainchild of Jeff Weber and Aaron Edsinger, cofounders of Meka Robotics, its name comes from the Japanese phrase for "thank you very much", domo arigato, as well as the Styx song, "Mr. Roboto". The Domo project was originally funded by NASA, and has now been joined by Toyota in funding robot's development.
SIGMO is a humanoid robot designed to demonstrate the applications of passive dynamics technologies.
The goal of the LOPES project is to design and implement a gait rehabilitation robot for treadmill training. The target group consists of people who have had a stroke and have impaired motor control. The main goals of LOPES are:

Six degrees of freedom (6DOF) refers to the six mechanical degrees of freedom of movement of a rigid body in three-dimensional space. Specifically, the body is free to change position as forward/backward (surge), up/down (heave), left/right (sway) translation in three perpendicular axes, combined with changes in orientation through rotation about three perpendicular axes, often termed yaw, pitch, and roll.

iCub is a 1 metre tall open source robotics humanoid robot testbed for research into human cognition and artificial intelligence.

Marc Raibert is the founder, former CEO, and now Chairman of Boston Dynamics, a robotics company known for creating BigDog, Atlas, Spot, and Handle. He currently serves as the Executive Director of the Boston Dynamics AI Institute, a Hyundai Motor Group organization that is focused on solving the most important problems in robotics and artificial intelligence to achieve fundamental advances in the engineering and science of robotics.
A ball balancing robot also known as a ballbot is a dynamically-stable mobile robot designed to balance on a single spherical wheel. Through its single contact point with the ground, a ballbot is omnidirectional and thus exceptionally agile, maneuverable and organic in motion compared to other ground vehicles. Its dynamic stability enables improved navigability in narrow, crowded and dynamic environments. The ballbot works on the same principle as that of an inverted pendulum.

Legged robots are a type of mobile robot which use articulated limbs, such as leg mechanisms, to provide locomotion. They are more versatile than wheeled robots and can traverse many different terrains, though these advantages require increased complexity and power consumption. Legged robots often imitate legged animals, such as humans or insects, in an example of biomimicry.
Boston Dynamics is an American engineering and robotics design company founded in 1992 as a spin-off from the Massachusetts Institute of Technology. Headquartered in Waltham, Massachusetts, Boston Dynamics has been owned by the Hyundai Motor Group since December 2020, but having only completed the acquisition in June 2021.

Robotics is an interdisciplinary branch of Electronics & Communication, computer science and engineering. Robotics involves the design, construction, operation, and use of robots. The goal of robotics is to design machines that can help and assist humans. Robotics integrates fields of mechanical engineering, electrical engineering, information engineering, mechatronics engineering, electronics, biomedical engineering, computer engineering, control systems engineering, software engineering, mathematics, etc.
The following outline is provided as an overview of and topical guide to robotics:
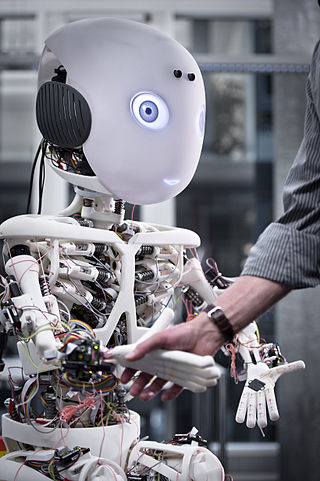
Roboy is an advanced humanoid robot that was developed at the Artificial Intelligence Laboratory of the University of Zurich, and was publicly presented on March 8, 2013. Originally designed to emulate humans with the future possibility of helping out in daily environments, Roboy is a project that has involved both engineers and scientists. Initiated in 2012 by Pascal Kaufmann, Roboy is the work of engineers who designed him according to design principles developed by Prof. Dr. Rolf Pfeifer, the AI lab director, in conjunction with the assistance of other development partners. Both the team members and the partners of the Roboy project share a commitment toward continued research in the area of soft robotics. Later Roboy was moved to Munich, Germany, where Rafael Hostettler conducts research on it at the Technical University. Since July 2020, Roboy is located back in Zurich, Switzerland in the offices of the Mindfire Foundation.
As humans move through their environment, they must change the stiffness of their joints in order to effectively interact with their surroundings. Stiffness is the degree to a which an object resists deformation when subjected to a known force. This idea is also referred to as impedance, however, sometimes the idea of deformation under a given load is discussed under the term "compliance" which is the opposite of stiffness . In order to effectively interact with their environment, humans must adjust the stiffness of their limbs. This is accomplished via the co-contraction of antagonistic muscle groups.

Oussama Khatib is a roboticist and a professor of computer science at Stanford University, and a Fellow of the IEEE. He is credited with seminal work in areas ranging from robot motion planning and control, human-friendly robot design, to haptic interaction and human motion synthesis. His work's emphasis has been to develop theories, algorithms, and technologies, that control robot systems by using models of their physical dynamics. These dynamic models are used to derive optimal controllers for complex robots that interact with the environment in real-time.

Nadine is a gynoid humanoid social robot that is modelled on Professor Nadia Magnenat Thalmann. The robot has a strong human-likeness with a natural-looking skin and hair and realistic hands. Nadine is a socially intelligent robot which returns a greeting, makes eye contact, and can remember all the conversations had with it. It is able to answer questions autonomously in several languages, simulate emotions both in gestures and facially, depending on the content of the interaction with the user. Nadine can recognise persons it has previously seen, and engage in flowing conversation. Nadine has been programmed with a "personality", in that its demeanour can change according to what is said to it. Nadine has a total of 27 degrees of freedom for facial expressions and upper body movements. With persons it has previously encountered, it remembers facts and events related to each person. It can assist people with special needs by reading stories, showing images, put on Skype sessions, send emails, and communicate with other members of the family. It can play the role of a receptionist in an office or be dedicated to be a personal coach.
The term “soft robots” designs a broad class of robotic systems whose architecture includes soft elements, with much higher elasticity than traditional rigid robots. Articulated Soft Robots are robots with both soft and rigid parts, inspired to the muscloloskeletal system of vertebrate animals – from reptiles to birds to mammalians to humans. Compliance is typically concentrated in actuators, transmission and joints while structural stability is provided by rigid or semi-rigid links.
References
- ↑ Humanoid Robotics Group
- ↑ "Physical Description of the Robot". Humanoid Robotics Group. Retrieved 25 October 2014.
- ↑ "The Coco Group". The Coco Group. Retrieved 25 October 2014.
- ↑ Robotics, co-sponsored by IEEE Industrial Electronics Society (IES); IEEE; (ASME), Automation Society (RAS); American Society of Mechanical Engineers (1999). Proceedings : September 19 - 23, 1999, Atlanta, Georgia, USA. Piscataway, NJ: IEEE Service Center. p. 561. ISBN 0-7803-5038-3.
- ↑ "Motor Control for a Quadruped Robot" (PDF). Motor Control for a Quadruped Robot.
- ↑ "Topics of Interest to the Group". Topics of Interest to the Group. Retrieved 26 October 2014.