Related Research Articles

The foot is an anatomical structure found in many vertebrates. It is the terminal portion of a limb which bears weight and allows locomotion. In many animals with feet, the foot is a separate organ at the terminal part of the leg made up of one or more segments or bones, generally including claws and/or nails.

Snakes are elongated, limbless, carnivorous reptiles of the suborder Serpentes. Like all other squamates, snakes are ectothermic, amniote vertebrates covered in overlapping scales. Many species of snakes have skulls with several more joints than their lizard ancestors, enabling them to swallow prey much larger than their heads. To accommodate their narrow bodies, snakes' paired organs appear one in front of the other instead of side by side, and most have only one functional lung. Some species retain a pelvic girdle with a pair of vestigial claws on either side of the cloaca. Lizards have independently evolved elongate bodies without limbs or with greatly reduced limbs at least twenty-five times via convergent evolution, leading to many lineages of legless lizards. These resemble snakes, but several common groups of legless lizards have eyelids and external ears, which snakes lack, although this rule is not universal.

The leg is the entire lower limb of the human body, including the foot, thigh or sometimes even the hip or buttock region. The major bones of the leg are the femur, tibia, and adjacent fibula. The thigh is between the hip and knee, while the calf (rear) and shin (front) are between the knee and foot.

The median nerve is a nerve in humans and other animals in the upper limb. It is one of the five main nerves originating from the brachial plexus.

The upper limbs or upper extremities are the forelimbs of an upright-postured tetrapod vertebrate, extending from the scapulae and clavicles down to and including the digits, including all the musculatures and ligaments involved with the shoulder, elbow, wrist and knuckle joints. In humans, each upper limb is divided into the arm, forearm and hand, and is primarily used for climbing, lifting and manipulating objects.
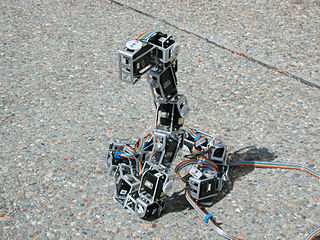
The SnakeBot, also known as a snake robot, is a biomorphic hyper-redundant robot that resembles a biological snake. Snake robots come in many shapes and sizes, from as long as four stories to a medical SnakeBot developed at Carnegie Mellon University that is thin enough to maneuver around organs inside a human chest cavity. Though SnakeBots can very greatly in size and design, there are two qualities that all SnakeBot share. The small cross-section-to-length ratios allow them to move into and maneuver through tight spaces and their ability to change the shape of their bodies allows them to perform a wide range of behaviors, such as climbing stairs or tree trunks. Additionally, many snake robots are constructed by chaining together several independent links. This redundancy can make them resistant to failure because they can continue to operate even if parts of their body are destroyed. Properties such as high terrainability, redundancy, and the ability to completely seal their bodies make snake robots particularly notable for practical applications and hence as a research topic. A SnakeBot is different from a snake-arm robot in that the SnakeBot robot types are usually more self-contained, where a snake-arm robot usually has remote mechanicals from the arm itself, possibly connected to a larger system.

Rectilinear locomotion or rectilinear progression is a mode of locomotion most often associated with snakes. In particular, it is associated with heavy-bodied species such as terrestrial African adders, pythons and boas; however, most snakes are capable of it. It is one of at least five forms of locomotion used by snakes, the others being lateral undulation, sidewinding, concertina movement, and slide-pushing. Unlike all other modes of snake locomotion, which include the snake bending its body, the snake flexes its body only when turning in rectilinear locomotion.

Sidewinding is a type of locomotion unique to snakes, used to move across loose or slippery substrates. It is most often used by the Saharan horned viper, Cerastes cerastes, the Mojave sidewinder rattlesnake, Crotalus cerastes, and the Namib desert sidewinding adder, Bitis peringueyi, to move across loose desert sands, and also by Homalopsine snakes in Southeast Asia to move across tidal mud flats. Any number of caenophidian snakes can be induced to sidewind on smooth surfaces, though the difficulty in getting them to do so and their proficiency at it vary greatly.

Animal locomotion, in ethology, is any of a variety of methods that animals use to move from one place to another. Some modes of locomotion are (initially) self-propelled, e.g., running, swimming, jumping, flying, hopping, soaring and gliding. There are also many animal species that depend on their environment for transportation, a type of mobility called passive locomotion, e.g., sailing, kiting (spiders), rolling or riding other animals (phoresis).

Fish locomotion is the various types of animal locomotion used by fish, principally by swimming. This is achieved in different groups of fish by a variety of mechanisms of propulsion, most often by wave-like lateral flexions of the fish's body and tail in the water, and in various specialised fish by motions of the fins. The major forms of locomotion in fish are:

Chrysopelea, more commonly known as the flying snake or gliding snake is a genus that belongs to the family Colubridae. Flying snakes are mildly venomous, though the venom is dangerous only to their small prey. Their range is in Southeast Asia, southernmost China, India, and Sri Lanka.

Terrestrial locomotion has evolved as animals adapted from aquatic to terrestrial environments. Locomotion on land raises different problems than that in water, with reduced friction being replaced by the increased effects of gravity.
Gliding flight is heavier-than-air flight without the use of thrust; the term volplaning also refers to this mode of flight in animals. It is employed by gliding animals and by aircraft such as gliders. This mode of flight involves flying a significant distance horizontally compared to its descent and therefore can be distinguished from a mostly straight downward descent like a round parachute.

Arboreal locomotion is the locomotion of animals in trees. In habitats in which trees are present, animals have evolved to move in them. Some animals may scale trees only occasionally, but others are exclusively arboreal. The habitats pose numerous mechanical challenges to animals moving through them and lead to a variety of anatomical, behavioral and ecological consequences as well as variations throughout different species. Furthermore, many of these same principles may be applied to climbing without trees, such as on rock piles or mountains.

The elbow is the region between the upper arm and the forearm that surrounds the elbow joint. The elbow includes prominent landmarks such as the olecranon, the cubital fossa, and the lateral and the medial epicondyles of the humerus. The elbow joint is a hinge joint between the arm and the forearm; more specifically between the humerus in the upper arm and the radius and ulna in the forearm which allows the forearm and hand to be moved towards and away from the body. The term elbow is specifically used for humans and other primates, and in other vertebrates it is not used. In those cases, forelimb plus joint is used.

Aquatic locomotion or swimming is biologically propelled motion through a liquid medium. The simplest propulsive systems are composed of cilia and flagella. Swimming has evolved a number of times in a range of organisms including arthropods, fish, molluscs, amphibians, reptiles, birds, and mammals.

Undulatory locomotion is the type of motion characterized by wave-like movement patterns that act to propel an animal forward. Examples of this type of gait include crawling in snakes, or swimming in the lamprey. Although this is typically the type of gait utilized by limbless animals, some creatures with limbs, such as the salamander, forgo use of their legs in certain environments and exhibit undulatory locomotion. In robotics this movement strategy is studied in order to create novel robotic devices capable of traversing a variety of environments.

Bio-inspired robotic locomotion is a fairly new subcategory of bio-inspired design. It is about learning concepts from nature and applying them to the design of real-world engineered systems. More specifically, this field is about making robots that are inspired by biological systems, including Biomimicry. Biomimicry is copying from nature while bio-inspired design is learning from nature and making a mechanism that is simpler and more effective than the system observed in nature. Biomimicry has led to the development of a different branch of robotics called soft robotics. The biological systems have been optimized for specific tasks according to their habitat. However, they are multifunctional and are not designed for only one specific functionality. Bio-inspired robotics is about studying biological systems, and looking for the mechanisms that may solve a problem in the engineering field. The designer should then try to simplify and enhance that mechanism for the specific task of interest. Bio-inspired roboticists are usually interested in biosensors, bioactuators, or biomaterials. Most of the robots have some type of locomotion system. Thus, in this article different modes of animal locomotion and few examples of the corresponding bio-inspired robots are introduced.

Cutaneous, superficial, or skin reflexes, are activated by skin receptors and play a valuable role in locomotion, providing quick responses to unexpected environmental challenges. They have been shown to be important in responses to obstacles or stumbling, in preparing for visually challenging terrain, and for assistance in making adjustments when instability is introduced. In addition to the role in normal locomotion, cutaneous reflexes are being studied for their potential in enhancing rehabilitation therapy (physiotherapy) for people with gait abnormalities.
Batoids are a superorder of cartilaginous fish consisting of skates, rays and other fish all characterized by dorsoventrally flattened bodies and large pectoral fins fused to the head. This distinctive morphology has resulted in several unique forms of locomotion. Most Batoids exhibit median paired fin swimming, utilizing their enlarged pectoral fins. Batoids that exhibit median paired fin swimming fall somewhere along a spectrum of swimming modes from mobuliform to rajiform based on the number of waves present on their fin at once. Of the four orders of Batoidae this holds truest for the Myliobatiformes (rays) and the Rajiformes (skates). The two other orders: Rhinopristiformes and Torpediniformes exhibit a greater degree of body caudal fin swimming.
References
- ↑ Gray, J. (1946), "The mechanism of locomotion in snakes", Journal of Experimental Biology, 23 (2): 101–120, doi:10.1242/jeb.23.2.101, PMID 20281580
- ↑ Campbell, Sheldon; Shaw, Charles E. (1974). Snakes of The American West. New York: Alfred A. Knopf. ISBN 978-0-394-48882-0.
- 1 2 3 Jayne, B.C. (1986), "Kinematics of terrestrial snake locomotion", Copeia, 1986 (4): 915–927, doi:10.2307/1445288, JSTOR 1445288
- ↑ Walton, M.; Jayne, B.C.; Bennett, A.F. (1990), "The energetic cost of limbless locomotion", Science, 249 (4968): 524–527, Bibcode:1990Sci...249..524W, doi:10.1126/science.249.4968.524, PMID 17735283, S2CID 17065200
- 1 2 3 Astley, H.C.; Jayne, B.C. (2007), "Effects of perch diameter and incline on the kinematics, performance and modes of arboreal locomotion of corn snakes (Elaphe guttata)", Journal of Experimental Biology, 210 (Pt 21): 3862–3872, doi: 10.1242/jeb.009050 , PMID 17951427
- ↑ Machemer, Theresa (11 January 2021). "Invasive Brown Tree Snakes Stun Scientists With Amazing New Climbing Tactic". Smithsonian . Retrieved 11 January 2021.
- ↑ Savidge, Julie A.; Seibert, Thomas F.; Kastner, Martin; Jayne, Bruce C. (11 January 2021). "Lasso locomotion expands the climbing repertoire of snakes". Current Biology. Retrieved 2 August 2023.