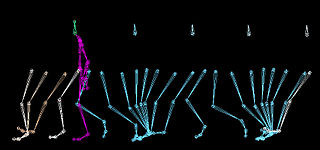
Walking is one of the main gaits of terrestrial locomotion among legged animals. Walking is typically slower than running and other gaits. Walking is defined by an "inverted pendulum" gait in which the body vaults over the stiff limb or limbs with each step. This applies regardless of the usable number of limbs—even arthropods, with six, eight, or more limbs, walk. In humans, walking has health benefits including improved mental health and reduced risk of cardiovascular disease and death.

Propulsion is the generation of force by any combination of pushing or pulling to modify the translational motion of an object, which is typically a rigid body but may also concern a fluid. The term is derived from two Latin words: pro, meaning before or forward; and pellere, meaning to drive. A propulsion system consists of a source of mechanical power, and a propulsor.
Gait is the pattern of movement of the limbs of animals, including humans, during locomotion over a solid substrate. Most animals use a variety of gaits, selecting gait based on speed, terrain, the need to maneuver, and energetic efficiency. Different animal species may use different gaits due to differences in anatomy that prevent use of certain gaits, or simply due to evolved innate preferences as a result of habitat differences. While various gaits are given specific names, the complexity of biological systems and interacting with the environment make these distinctions "fuzzy" at best. Gaits are typically classified according to footfall patterns, but recent studies often prefer definitions based on mechanics. The term typically does not refer to limb-based propulsion through fluid mediums such as water or air, but rather to propulsion across a solid substrate by generating reactive forces against it.

Surface tension is the tendency of liquid surfaces at rest to shrink into the minimum surface area possible. Surface tension is what allows objects with a higher density than water such as razor blades and insects to float on a water surface without becoming even partly submerged.

Flight or flying is the process by which an object moves through a space without contacting any planetary surface, either within an atmosphere or through the vacuum of outer space. This can be achieved by generating aerodynamic lift associated with gliding or propulsive thrust, aerostatically using buoyancy, or by ballistic movement.

The Gerridae are a family of insects in the order Hemiptera, commonly known as water striders, water skeeters, water scooters, water bugs, pond skaters, water skippers, water gliders, water skimmers or puddle flies. Consistent with the classification of the Gerridae as true bugs, gerrids have mouthparts evolved for piercing and sucking, and distinguish themselves by having the unusual ability to walk on water, making them pleuston (surface-living) animals. They are anatomically built to transfer their weight to be able to run on top of the water's surface. As a result, one could likely find water striders present in any pond, river, or lake. Over 1,700 species of gerrids have been described, 10% of them being marine.

In biology, Denny's paradox refers to the apparent impossibility of surface-dwelling animals such as the water strider generating enough propulsive force to move. It is named after biologist Mark Denny, and relates to animal locomotion on the surface layer of water.

Animal locomotion, in ethology, is any of a variety of methods that animals use to move from one place to another. Some modes of locomotion are (initially) self-propelled, e.g., running, swimming, jumping, flying, hopping, soaring and gliding. There are also many animal species that depend on their environment for transportation, a type of mobility called passive locomotion, e.g., sailing, kiting (spiders), rolling or riding other animals (phoresis).
Robot locomotion is the collective name for the various methods that robots use to transport themselves from place to place.

Velella is a monospecific genus of hydrozoa in the Porpitidae family. Its only known species is Velella velella, a cosmopolitan free-floating hydrozoan that lives on the surface of the open ocean. It is commonly known by the names sea raft, by-the-wind sailor, purple sail, little sail, or simply Velella.

Fish locomotion is the various types of animal locomotion used by fish, principally by swimming. This is achieved in different groups of fish by a variety of mechanisms of propulsion, most often by wave-like lateral flexions of the fish's body and tail in the water, and in various specialised fish by motions of the fins. The major forms of locomotion in fish are:

Allometry is the study of the relationship of body size to shape, anatomy, physiology and behaviour, first outlined by Otto Snell in 1892, by D'Arcy Thompson in 1917 in On Growth and Form and by Julian Huxley in 1932.

A number of animals are capable of aerial locomotion, either by powered flight or by gliding. This trait has appeared by evolution many times, without any single common ancestor. Flight has evolved at least four times in separate animals: insects, pterosaurs, birds, and bats. Gliding has evolved on many more occasions. Usually the development is to aid canopy animals in getting from tree to tree, although there are other possibilities. Gliding, in particular, has evolved among rainforest animals, especially in the rainforests in Asia where the trees are tall and widely spaced. Several species of aquatic animals, and a few amphibians and reptiles have also evolved this gliding flight ability, typically as a means of evading predators.

Terrestrial locomotion has evolved as animals adapted from aquatic to terrestrial environments. Locomotion on land raises different problems than that in water, with reduced friction being replaced by the increased effects of gravity.

Aquatic locomotion or swimming is biologically propelled motion through a liquid medium. The simplest propulsive systems are composed of cilia and flagella. Swimming has evolved a number of times in a range of organisms including arthropods, fish, molluscs, amphibians, reptiles, birds, and mammals.

Robostrider is a self-propelled robot which uses similar mechanisms to real water striders in order to glide along the surface of the water. It was developed at Cambridge, Massachusetts.

John Oluseun Dabiri is a Nigerian-American aeronautics engineer and the Centennial Chair Professor at the California Institute of Technology (Caltech), with appointments in the Graduate Aerospace Laboratories (GALCIT) and Mechanical Engineering. His research focuses on unsteady fluid mechanics and flow physics, with particular emphasis on topics relevant to biology, energy, and the environment. He is best known for his research of the hydrodynamics of jellyfish propulsion and the design of a vertical-axis wind farm adapted from schooling fish. He is the director of the Biological Propulsion Laboratory, which examines fluid transport with applications in aquatic locomotion, fluid dynamic energy conversion, and cardiac flows, as well as applying theoretical methods in fluid dynamics and concepts of optimal vortex formation.
Flotation of flexible objects is a phenomenon in which the bending of a flexible material allows an object to displace a greater amount of fluid than if it were completely rigid. This ability to displace more fluid translates directly into an ability to support greater loads, giving the flexible structure an advantage over a similarly rigid one. Inspiration to study the effects of elasticity are taken from nature, where plants, such as black pepper, and animals living at the water surface have evolved to take advantage of the load-bearing benefits elasticity imparts.
Surface tension is one of the areas of interest in biomimetics research. Surface tension forces will only begin to dominate gravitational forces below length scales on the order of the fluid's capillary length, which for water is about 2 millimeters. Because of this scaling, biomimetic devices that utilize surface tension will generally be very small, however there are many ways in which such devices could be used.

The webbed foot is a specialized limb with interdigital membranes (webbings) that aids in aquatic locomotion, present in a variety of tetrapod vertebrates. This adaptation is primarily found in semiaquatic species, and has convergently evolved many times across vertebrate taxa.

