
The foot is an anatomical structure found in many vertebrates. It is the terminal portion of a limb which bears weight and allows locomotion. In many animals with feet, the foot is a separate organ at the terminal part of the leg made up of one or more segments or bones, generally including claws and/or nails.

Quadrupedalism is a form of locomotion where four limbs are used to bear weight and move around. An animal or machine that usually maintains a four-legged posture and moves using all four limbs is said to be a quadruped. Quadruped animals are found among both vertebrates and invertebrates.
Gait is the pattern of movement of the limbs of animals, including humans, during locomotion over a solid substrate. Most animals use a variety of gaits, selecting gait based on speed, terrain, the need to maneuver, and energetic efficiency. Different animal species may use different gaits due to differences in anatomy that prevent use of certain gaits, or simply due to evolved innate preferences as a result of habitat differences. While various gaits are given specific names, the complexity of biological systems and interacting with the environment make these distinctions "fuzzy" at best. Gaits are typically classified according to footfall patterns, but recent studies often prefer definitions based on mechanics. The term typically does not refer to limb-based propulsion through fluid mediums such as water or air, but rather to propulsion across a solid substrate by generating reactive forces against it.

A paw is the soft foot-like part of a mammal, generally a quadruped, that has claws.
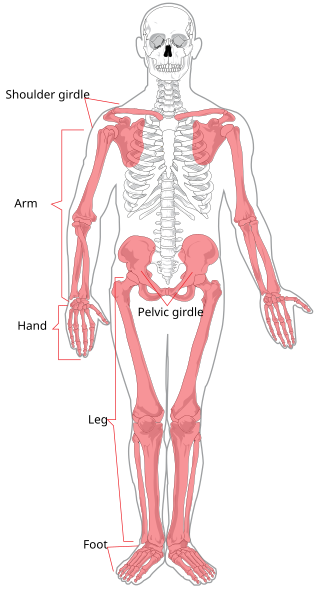
The appendicular skeleton is the portion of the vertebrate endoskeleton consisting of the bones and cartilages that support the paired appendages. In most terrestrial vertebrates, the appendicular skeleton and the associated skeletal muscles are the predominant locomotive structures.

The navicular bone is a small bone found in the feet of most mammals.

The upper limbs or upper extremities are the forelimbs of an upright-postured tetrapod vertebrate, extending from the scapulae and clavicles down to and including the digits, including all the musculatures and ligaments involved with the shoulder, elbow, wrist and knuckle joints. In humans, each upper limb is divided into the arm, forearm and hand, and is primarily used for climbing, lifting and manipulating objects.

In terrestrial vertebrates, digitigrade locomotion is walking or running on the toes. A digitigrade animal is one that stands or walks with its toes (phalanges) on the ground, and the rest of its foot lifted. Digitigrades include birds, cats, dogs, and many other mammals, but not plantigrades or unguligrades. Digitigrades generally move more quickly than other animals.

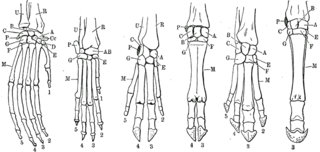
The phalanges are digital bones in the hands and feet of most vertebrates. In primates, the thumbs and big toes have two phalanges while the other digits have three phalanges. The phalanges are classed as long bones.
A forelimb or front limb is one of the paired articulated appendages (limbs) attached on the cranial (anterior) end of a terrestrial tetrapod vertebrate's torso. With reference to quadrupeds, the term foreleg or front leg is often used instead. In bipedal animals with an upright posture, the term upper limb is often used.

Laminitis is a disease that affects the feet of ungulates and is found mostly in horses and cattle. Clinical signs include foot tenderness progressing to inability to walk, increased digital pulses, and increased temperature in the hooves. Severe cases with outwardly visible clinical signs are known by the colloquial term founder, and progression of the disease will lead to perforation of the coffin bone through the sole of the hoof or being unable to stand up, requiring euthanasia.
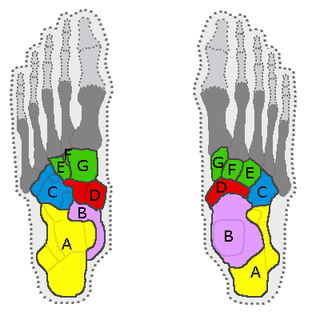
In the human body, the tarsus is a cluster of seven articulating bones in each foot situated between the lower end of the tibia and the fibula of the lower leg and the metatarsus. It is made up of the midfoot and hindfoot.
A cursorial organism is one that is adapted specifically to run. An animal can be considered cursorial if it has the ability to run fast or if it can keep a constant speed for a long distance. "Cursorial" is often used to categorize a certain locomotor mode, which is helpful for biologists who examine behaviors of different animals and the way they move in their environment. Cursorial adaptations can be identified by morphological characteristics, physiological characteristics, maximum speed, and how often running is used in life. There is much debate over how to define a cursorial animal specifically. The most accepted definitions include that a cursorial organism could be considered adapted to long-distance running at high speeds or has the ability to accelerate quickly over short distances. Among vertebrates, animals under 1 kg of mass are rarely considered cursorial, and cursorial behaviors and morphology are thought to only occur at relatively large body masses in mammals. There are a few mammals that have been termed "micro-cursors" that are less than 1 kg in mass and have the ability to run faster than other small animals of similar sizes.
Many vertebrates are limbless, limb-reduced, or apodous, with a body plan consisting of a head and vertebral column, but no adjoining limbs such as legs or fins. Jawless fish are limbless but may have preceded the evolution of vertebrate limbs, whereas numerous reptile and amphibian lineages – and some eels and eel-like fish – independently lost their limbs. Larval amphibians, tadpoles, are also often limbless. No mammals or birds are limbless, but some feature partial limb-loss or limb reduction.

Terrestrial locomotion has evolved as animals adapted from aquatic to terrestrial environments. Locomotion on land raises different problems than that in water, with reduced friction being replaced by the increased effects of gravity.
A facultative biped is an animal that is capable of walking or running on two legs (bipedal), as a response to exceptional circumstances (facultative), while normally walking or running on four limbs or more. In contrast, obligate bipedalism is where walking or running on two legs is the primary method of locomotion. Facultative bipedalism has been observed in several families of lizards and multiple species of primates, including sifakas, capuchin monkeys, baboons, gibbons, gorillas, bonobos and chimpanzees. Several dinosaur and other prehistoric archosaur species are facultative bipeds, most notably ornithopods and marginocephalians, with some recorded examples within sauropodomorpha. Different facultatively bipedal species employ different types of bipedalism corresponding to the varying reasons they have for engaging in facultative bipedalism. In primates, bipedalism is often associated with food gathering and transport. In lizards, it has been debated whether bipedal locomotion is an advantage for speed and energy conservation or whether it is governed solely by the mechanics of the acceleration and lizard's center of mass. Facultative bipedalism is often divided into high-speed (lizards) and low-speed (gibbons), but some species cannot be easily categorized into one of these two. Facultative bipedalism has also been observed in cockroaches and some desert rodents.
A limb is a jointed, muscled appendage of a tetrapod vertebrate animal used for weight-bearing, terrestrial locomotion and physical interaction with other objects. The distalmost portion of a limb is known as its extremity. The limbs' bony endoskeleton, known as the appendicular skeleton, is homologous among all tetrapods, who use their limbs for walking, running and jumping, swimming, climbing, grasping, touching and striking.
Lameness is an abnormal gait or stance of an animal that is the result of dysfunction of the locomotor system. In the horse, it is most commonly caused by pain, but can be due to neurologic or mechanical dysfunction. Lameness is a common veterinary problem in racehorses, sport horses, and pleasure horses. It is one of the most costly health problems for the equine industry, both monetarily for the cost of diagnosis and treatment, and for the cost of time off resulting in loss-of-use.

A leg is a weight-bearing and locomotive anatomical structure, usually having a columnar shape. During locomotion, legs function as "extensible struts". The combination of movements at all joints can be modeled as a single, linear element capable of changing length and rotating about an omnidirectional "hip" joint.

The limbs of the horse are structures made of dozens of bones, joints, muscles, tendons, and ligaments that support the weight of the equine body. They include two apparatuses: the suspensory apparatus, which carries much of the weight, prevents overextension of the joint and absorbs shock, and the stay apparatus, which locks major joints in the limbs, allowing horses to remain standing while relaxed or asleep. The limbs play a major part in the movement of the horse, with the legs performing the functions of absorbing impact, bearing weight, and providing thrust. In general, the majority of the weight is borne by the front legs, while the rear legs provide propulsion. The hooves are also important structures, providing support, traction and shock absorption, and containing structures that provide blood flow through the lower leg. As the horse developed as a cursorial animal, with a primary defense mechanism of running over hard ground, its legs evolved to the long, sturdy, light-weight, one-toed form seen today.








