
In fluid dynamics, a stall is a reduction in the lift coefficient generated by a foil as angle of attack increases. This occurs when the critical angle of attack of the foil is exceeded. The critical angle of attack is typically about 15°, but it may vary significantly depending on the fluid, foil, and Reynolds number.

Landing is the last part of a flight, where a flying animal, aircraft, or spacecraft returns to the ground. When the flying object returns to water, the process is called alighting, although it is commonly called "landing", "touchdown"a or "splashdown" as well. A normal aircraft flight would include several parts of flight including taxi, takeoff, climb, cruise, descent and landing.
Aviation is the design, development, production, operation, and use of aircraft, especially heavier-than-air aircraft. Articles related to aviation include:

The airspeed indicator (ASI) or airspeed gauge is a flight instrument indicating the airspeed of an aircraft in kilometres per hour (km/h), knots, miles per hour (MPH) and/or metres per second (m/s). The recommendation by ICAO is to use km/h, however knots (kt) is currently the most used unit. The ASI measures the pressure differential between static pressure from the static port, and total pressure from the pitot tube. This difference in pressure is registered with the ASI pointer on the face of the instrument.

In flight dynamics a spin is a special category of stall resulting in autorotation about the aircraft's longitudinal axis and a shallow, rotating, downward path approximately centred on a vertical axis. Spins can be entered intentionally or unintentionally, from any flight attitude if the aircraft has sufficient yaw while at the stall point. In a normal spin, the wing on the inside of the turn stalls while the outside wing remains flying. It is possible for both wings to stall, but the angle of attack of each wing, and consequently its lift and drag, are different.

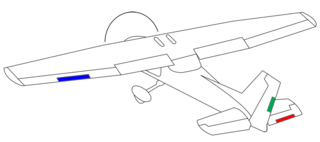
Aircraft flight control surfaces are aerodynamic devices allowing a pilot to adjust and control the aircraft's flight attitude.

A slip is an aerodynamic state where an aircraft is moving somewhat sideways as well as forward relative to the oncoming airflow or relative wind. In other words, for a conventional aircraft, the nose will be pointing in the opposite direction to the bank of the wing(s). The aircraft is not in coordinated flight and therefore is flying inefficiently.

In aviation, a ground loop is a rapid rotation of a fixed-wing aircraft in the horizontal plane (yawing) while on the ground. Aerodynamic forces may cause the advancing wing to rise, which may then cause the other wingtip to touch the ground. In severe cases, the inside wing can dig in, causing the aircraft to swing violently or even cartwheel. In their early gliding experiments, the Wright Brothers referred to this action as well-digging.

Dutch roll is an aircraft motion consisting of an out-of-phase combination of "tail-wagging" (yaw) and rocking from side to side (roll). This yaw-roll coupling is one of the basic flight dynamic modes. This motion is normally well damped in most light aircraft, though some aircraft with well-damped Dutch roll modes can experience a degradation in damping as airspeed decreases and altitude increases. Dutch roll stability can be artificially increased by the installation of a yaw damper. Wings placed well above the center of gravity, swept wings, and dihedral wings tend to increase the roll restoring force, and therefore increase the Dutch roll tendencies; this is why high-winged aircraft often are slightly anhedral, and transport-category swept-wing aircraft are equipped with yaw dampers. A similar phenomenon can happen in a trailer pulled by a car.
Aircraft flight mechanics are relevant to fixed wing and rotary wing (helicopters) aircraft. An aeroplane, is defined in ICAO Document 9110 as, "a power-driven heavier than air aircraft, deriving its lift chiefly from aerodynamic reactions on surface which remain fixed under given conditions of flight".
Trim tabs are small surfaces connected to the trailing edge of a larger control surface on a boat or aircraft, used to control the trim of the controls, i.e. to counteract hydro- or aerodynamic forces and stabilise the boat or aircraft in a particular desired attitude without the need for the operator to constantly apply a control force. This is done by adjusting the angle of the tab relative to the larger surface.

A vertical stabilizer or tail fin is the static part of the vertical tail of an aircraft. The term is commonly applied to the assembly of both this fixed surface and one or more movable rudders hinged to it. Their role is to provide control, stability and trim in yaw. It is part of the aircraft empennage, specifically of its stabilizers.
The critical engine of a multi-engine fixed-wing aircraft is the engine that, in the event of failure, would most adversely affect the performance or handling abilities of an aircraft. On propeller aircraft, there is a difference in the remaining yawing moments after failure of the left or the right (outboard) engine when all propellers rotate in the same direction due to the P-factor. On turbojet and turbofan twin-engine aircraft, there usually is no difference between the yawing moments after failure of a left or right engine in no-wind condition.
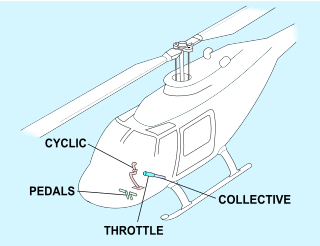
Helicopter flight controls are used to achieve and maintain controlled aerodynamic helicopter flight. Changes to the aircraft flight control system transmit mechanically to the rotor, producing aerodynamic effects on the rotor blades that make the helicopter move in a desired way. To tilt forward and back (pitch) or sideways (roll) requires that the controls alter the angle of attack of the main rotor blades cyclically during rotation, creating differing amounts of lift at different points in the cycle. To increase or decrease overall lift requires that the controls alter the angle of attack for all blades collectively by equal amounts at the same time, resulting in ascent, descent, acceleration and deceleration.
Aircraft upset is an unacceptable condition, in aircraft operations, in which the aircraft flight attitude or airspeed is outside the normally intended limits. This may result in the loss of control (LOC) of the aircraft, and sometimes the total loss of the aircraft itself. Loss of control may be due to excessive altitude for the airplane's weight, turbulent weather, pilot disorientation, or a system failure.

P-factor, also known as asymmetric blade effect and asymmetric disc effect, is an aerodynamic phenomenon experienced by a moving propeller, wherein the propeller's center of thrust moves off-center when the aircraft is at a high angle of attack. This shift in the location of the center of thrust will exert a yawing moment on the aircraft, causing it to yaw slightly to one side. A rudder input is required to counteract the yawing tendency.

The yaw string, also known as a slip string, is a simple device for indicating a slip or skid in an aircraft in flight. It performs the same function as the slip-skid indicator ball, but is more sensitive, and does not require the pilot to look down at the instrument panel. Technically, it measures sideslip angle, not yaw angle, but this indicates how the aircraft must be yawed to return the sideslip angle to zero.

An aircraft in flight is free to rotate in three dimensions: yaw, nose left or right about an axis running up and down; pitch, nose up or down about an axis running from wing to wing; and roll, rotation about an axis running from nose to tail. The axes are alternatively designated as vertical, lateral, and longitudinal respectively. These axes move with the vehicle and rotate relative to the Earth along with the craft. These definitions were analogously applied to spacecraft when the first crewed spacecraft were designed in the late 1950s.

In aviation, V-speeds are standard terms used to define airspeeds important or useful to the operation of all aircraft. These speeds are derived from data obtained by aircraft designers and manufacturers during flight testing for aircraft type-certification. Using them is considered a best practice to maximize aviation safety, aircraft performance, or both.

Loss of tail-rotor effectiveness (LTE) occurs when the tail rotor of a helicopter is exposed to wind forces that prevent it from carrying out its function—that of cancelling the torque of the engine and transmission. Any low-airspeed high-power environment provides an opportunity for it to occur.


