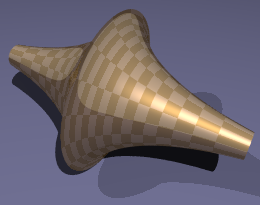
In geometry, a pseudosphere is a surface in . It is the most famous example of a pseudospherical surface. A pseudospherical surface is a surface piecewise smoothly immersed in with constant negative Gaussian curvature. A "pseudospherical surface of radius R" is a surface in having curvature −1/R2 at each point. Its name comes from the analogy with the sphere of radius R, which is a surface of curvature 1/R2. Examples include the tractroid, Dini's surfaces, breather surfaces, and the Kuen surface.
By "the pseudosphere", people usually mean the tractroid. The tractroid is obtained by revolving a tractrix about its asymptote. As an example, the (half) pseudosphere (with radius 1) is the surface of revolution of the tractrix parametrized by[2]
The name "pseudosphere" comes about because it has a two-dimensionalsurface of constant negative Gaussian curvature, just as a sphere has a surface with constant positive Gaussian curvature. Just as the sphere has at every point a positively curved geometry of a dome the whole pseudosphere has at every point the negatively curved geometry of a saddle.
As early as 1693 Christiaan Huygens found that the volume and the surface area of the pseudosphere are finite,[3] despite the infinite extent of the shape along the axis of rotation. For a given edge radiusR, the area is 4πR2 just as it is for the sphere, while the volume is 2/3πR3 and therefore half that of a sphere of that radius.[4][5]
The pseudosphere is an important geometric precursor to mathematical fabric arts and pedagogy.[6]
Line congruence
A line congruence is a 2-parameter families of lines in . It can be written aswhere each pick of picks a specific line in the family.
A focal surface of the line congruence is a surface that is tangent to the line congruence. At each point on the surface,The above equation expands to a quadratic equation in :Thus, for each , there in general exists two choices of . Thus a generic line congruence has exactly two focal surfaces parameterized by .
For a bundle of lines normal to a smooth surface, the two focal surfaces correspond to its evolutes: the loci of centers of principal curvature.
In 1879, Bianchi proved that if a line congruence is such that the corresponding points on the two focal surfaces are at a constant distance 1, that is, , then both of the focal surfaces have constant curvature -1.
In 1880, Lie proved a partial converse. Let be a pseudospherical surface. Then there exists a second pseudospherical surface and a line congruence such that and are the focal surfaces of . Furthermore, and may be constructed from by integrating a sequence of ODEs.
Universal covering space
The pseudosphere and its relation to three other models of hyperbolic geometry
The half pseudosphere of curvature −1 is covered by the interior of a horocycle. In the Poincaré half-plane model one convenient choice is the portion of the half-plane with y ≥ 1.[7] Then the covering map is periodic in the x direction of period 2π, and takes the horocycles y = c to the meridians of the pseudosphere and the vertical geodesics x = c to the tractrices that generate the pseudosphere. This mapping is a local isometry, and thus exhibits the portion y ≥ 1 of the upper half-plane as the universal covering space of the pseudosphere. The precise mapping is
In some sources that use the hyperboloid model of the hyperbolic plane, the hyperboloid is referred to as a pseudosphere.[8] This usage of the word is because the hyperboloid can be thought of as a sphere of imaginary radius, embedded in a Minkowski space.
Relation to solutions to the sine-Gordon equation
Pseudospherical surfaces can be constructed from solutions to the sine-Gordon equation.[9] A sketch proof starts with reparametrizing the tractroid with coordinates in which the Gauss–Codazzi equations can be rewritten as the sine-Gordon equation.
On a surface, at each point, draw a cross, pointing at the two directions of principal curvature. These crosses can be integrated into two families of curves, making up a coordinate system on the surface. Let the coordinate system be written as .
At each point on a pseudospherical surface there in general exists two asymptotic directions. Along them, the curvature is zero. Let the angle between the asymptotic directions be .
A theorem states thatIn particular, for the tractroid the Gauss–Codazzi equations are the sine-Gordon equation applied to the static soliton solution, so the Gauss–Codazzi equations are satisfied. In these coordinates the first and second fundamental forms are written in a way that makes clear the Gaussian curvature is −1 for any solution of the sine-Gordon equations.
Then any solution to the sine-Gordon equation can be used to specify a first and second fundamental form which satisfy the Gauss–Codazzi equations. There is then a theorem that any such set of initial data can be used to at least locally specify an immersed surface in .
This connection between sine-Gordon equations and pseudospherical surfaces mean that one can identify solutions to the equation with surfaces. Then, any way to generate new sine-Gordon solutions from old automatically generates new pseudospherical surfaces from old, and vice versa.
A few examples of sine-Gordon solutions and their corresponding surface are given as follows:
↑Beltrami, Eugenio (1868). "Saggio sulla interpretazione della geometria non euclidea" [Essay on the interpretation of noneuclidean geometry]. Gior. Mat. (in Italian). 6: 248–312. (Republished in Beltrami, Eugenio (1902). Opere Matematiche. Vol.1. Milan: Ulrico Hoepli. XXIV, pp.374–405. Translated into French as "Essai d'interprétation de la géométrie noneuclidéenne". Annales Scientifiques de l'École Normale Supérieure. Ser. 1. 6. Translated by J. Hoüel: 251–288. 1869. doi:10.24033/asens.60. EuDML80724. Translated into English as "Essay on the interpretation of noneuclidean geometry" by John Stillwell, in Stillwell 1996, pp.7–34.)
Stillwell, John (1996). Sources of Hyperbolic Geometry. American Mathematical Society & London Mathematical Society. ISBN0-8218-0529-0.
Henderson, D. W.; Taimina, D. (2006). "Experiencing Geometry: Euclidean and Non-Euclidean with History". Aesthetics and Mathematics(PDF). Springer-Verlag.
Rogers, C.; Schief, Wolfgang K., eds. (2002). Bäcklund and Darboux transformations: geometry and modern applications in soliton theory. Cambridge texts in applied mathematics. Cambridge New York: Cambridge University Press. ISBN978-0-521-01288-1.
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.