In graph theory, a planar graph is a graph that can be embedded in the plane, i.e., it can be drawn on the plane in such a way that its edges intersect only at their endpoints. In other words, it can be drawn in such a way that no edges cross each other. Such a drawing is called a plane graph, or a planar embedding of the graph. A plane graph can be defined as a planar graph with a mapping from every node to a point on a plane, and from every edge to a plane curve on that plane, such that the extreme points of each curve are the points mapped from its end nodes, and all curves are disjoint except on their extreme points.

In geometry, a simplex is a generalization of the notion of a triangle or tetrahedron to arbitrary dimensions. The simplex is so-named because it represents the simplest possible polytope in any given dimension. For example,

In mathematics, a Cayley graph, also known as a Cayley color graph, Cayley diagram, group diagram, or color group, is a graph that encodes the abstract structure of a group. Its definition is suggested by Cayley's theorem, and uses a specified set of generators for the group. It is a central tool in combinatorial and geometric group theory. The structure and symmetry of Cayley graphs makes them particularly good candidates for constructing expander graphs.
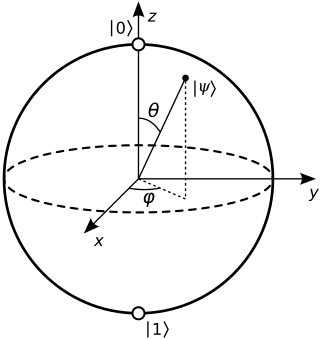
In quantum mechanics and computing, the Bloch sphere is a geometrical representation of the pure state space of a two-level quantum mechanical system (qubit), named after the physicist Felix Bloch.
In mathematics, a Killing vector field, named after Wilhelm Killing, is a vector field on a Riemannian manifold that preserves the metric. Killing fields are the infinitesimal generators of isometries; that is, flows generated by Killing fields are continuous isometries of the manifold. More simply, the flow generates a symmetry, in the sense that moving each point of an object the same distance in the direction of the Killing vector will not distort distances on the object.

Etendue or étendue is a property of light in an optical system, which characterizes how "spread out" the light is in area and angle. It corresponds to the beam parameter product (BPP) in Gaussian beam optics. Other names for etendue include acceptance, throughput, light grasp, light-gathering power, optical extent, and the AΩ product. Throughput and AΩ product are especially used in radiometry and radiative transfer where it is related to the view factor. It is a central concept in nonimaging optics.

In mathematics, and more specifically in graph theory, a multigraph is a graph which is permitted to have multiple edges, that is, edges that have the same end nodes. Thus two vertices may be connected by more than one edge.
String diagrams are a formal graphical language for representing morphisms in monoidal categories, or more generally 2-cells in 2-categories. They are a prominent tool in applied category theory. When interpreted in the monoidal category of vector spaces and linear maps with the tensor product, string diagrams are called tensor networks or Penrose graphical notation. This has led to the development of categorical quantum mechanics where the axioms of quantum theory are expressed in the language of monoidal categories.

In topological graph theory, an embedding of a graph on a surface is a representation of on in which points of are associated with vertices and simple arcs are associated with edges in such a way that:
In mathematics and physics, a quantum graph is a linear, network-shaped structure of vertices connected on edges in which each edge is given a length and where a differential equation is posed on each edge. An example would be a power network consisting of power lines (edges) connected at transformer stations (vertices); the differential equations would then describe the voltage along each of the lines, with boundary conditions for each edge provided at the adjacent vertices ensuring that the current added over all edges adds to zero at each vertex.
In astronomy, rotational Brownian motion is the random walk in orientation of a binary star's orbital plane, induced by gravitational perturbations from passing stars.
A combinatorial map is a combinatorial representation of a graph on an orientable surface. A combinatorial map may also be called a combinatorial embedding, a rotation system, an orientable ribbon graph, a fat graph, or a cyclic graph. More generally, an -dimensional combinatorial map is a combinatorial representation of a graph on an -dimensional orientable manifold.

In mathematics, a regular map is a symmetric tessellation of a closed surface. More precisely, a regular map is a decomposition of a two-dimensional manifold into topological disks such that every flag can be transformed into any other flag by a symmetry of the decomposition. Regular maps are, in a sense, topological generalizations of Platonic solids. The theory of maps and their classification is related to the theory of Riemann surfaces, hyperbolic geometry, and Galois theory. Regular maps are classified according to either: the genus and orientability of the supporting surface, the underlying graph, or the automorphism group.
Graphical models have become powerful frameworks for protein structure prediction, protein–protein interaction, and free energy calculations for protein structures. Using a graphical model to represent the protein structure allows the solution of many problems including secondary structure prediction, protein-protein interactions, protein-drug interaction, and free energy calculations.
In graph theory, a partial cube is a graph that is an isometric subgraph of a hypercube. In other words, a partial cube can be identified with a subgraph of a hypercube in such a way that the distance between any two vertices in the partial cube is the same as the distance between those vertices in the hypercube. Equivalently, a partial cube is a graph whose vertices can be labeled with bit strings of equal length in such a way that the distance between two vertices in the graph is equal to the Hamming distance between their labels. Such a labeling is called a Hamming labeling; it represents an isometric embedding of the partial cube into a hypercube.
In mathematics a translation surface is a surface obtained from identifying the sides of a polygon in the Euclidean plane by translations. An equivalent definition is a Riemann surface together with a holomorphic 1-form.

Symmetries in quantum mechanics describe features of spacetime and particles which are unchanged under some transformation, in the context of quantum mechanics, relativistic quantum mechanics and quantum field theory, and with applications in the mathematical formulation of the standard model and condensed matter physics. In general, symmetry in physics, invariance, and conservation laws, are fundamentally important constraints for formulating physical theories and models. In practice, they are powerful methods for solving problems and predicting what can happen. While conservation laws do not always give the answer to the problem directly, they form the correct constraints and the first steps to solving a multitude of problems. In application, understanding symmetries can also provide insights on the eigenstates that can be expected. For example, the existence of degenerate states can be inferred by the presence of non commuting symmetry operators or that the non degenerate states are also eigenvectors of symmetry operators.
In topological graph theory, a ribbon graph is a way to represent graph embeddings, equivalent in power to signed rotation systems or graph-encoded maps. It is convenient for visualizations of embeddings, because it can represent unoriented surfaces without self-intersections (unlike embeddings of the whole surface into three-dimensional Euclidean space) and because it omits the parts of the surface that are far away from the graph, allowing holes through which the rest of the embedding can be seen. Ribbon graphs are also called fat graphs.
A graph neural network (GNN) belongs to a class of artificial neural networks for processing data that can be represented as graphs.
Flag algebras are an important computational tool in the field of graph theory which have a wide range of applications in homomorphism density and related topics. Roughly, they formalize the notion of adding and multiplying homomorphism densities and set up a framework to solve graph homomorphism inequalities with computers by reducing them to semidefinite programming problems. Originally introduced by Alexander Razborov in a 2007 paper, the method has since come to solve numerous difficult, previously unresolved graph theoretic questions. These include the question regarding the region of feasible edge density, triangle density pairs and the maximum number of pentagons in triangle free graphs.






