In mathematics, any vector space has a corresponding dual vector space consisting of all linear forms on together with the vector space structure of pointwise addition and scalar multiplication by constants.

In mathematics, a diffeomorphism is an isomorphism of differentiable manifolds. It is an invertible function that maps one differentiable manifold to another such that both the function and its inverse are continuously differentiable.
In mathematics, specifically category theory, a functor is a mapping between categories. Functors were first considered in algebraic topology, where algebraic objects are associated to topological spaces, and maps between these algebraic objects are associated to continuous maps between spaces. Nowadays, functors are used throughout modern mathematics to relate various categories. Thus, functors are important in all areas within mathematics to which category theory is applied.

In vector calculus and physics, a vector field is an assignment of a vector to each point in a space, most commonly Euclidean space . A vector field on a plane can be visualized as a collection of arrows with given magnitudes and directions, each attached to a point on the plane. Vector fields are often used to model, for example, the speed and direction of a moving fluid throughout three dimensional space, such as the wind, or the strength and direction of some force, such as the magnetic or gravitational force, as it changes from one point to another point.

In geometry, a normal is an object that is perpendicular to a given object. For example, the normal line to a plane curve at a given point is the line perpendicular to the tangent line to the curve at the point.
In mathematics, differential forms provide a unified approach to define integrands over curves, surfaces, solids, and higher-dimensional manifolds. The modern notion of differential forms was pioneered by Élie Cartan. It has many applications, especially in geometry, topology and physics.
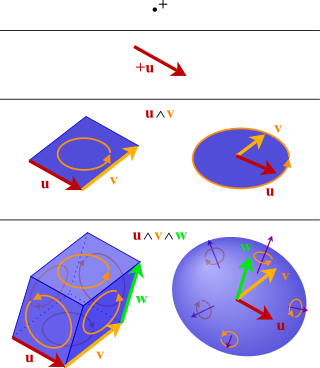
In mathematics, the exterior product or wedge product of vectors is an algebraic construction used in geometry to study areas, volumes, and their higher-dimensional analogs. The exterior product of two vectors u and v, denoted by u ∧ v, is called a bivector and lives in a space called the exterior square, a vector space that is distinct from the original space of vectors. The magnitude of u ∧ v can be interpreted as the area of the parallelogram with sides u and v, which in three dimensions can also be computed using the cross product of the two vectors. Like the cross product, the exterior product is anticommutative, meaning that u ∧ v = −(v ∧ u) for all vectors u and v, but, unlike the cross product, the exterior product is associative. One way to visualize a bivector is as a family of parallelograms all lying in the same plane, having the same area and orientation, which is a choice of rotational direction within the plane (clockwise or counterclockwise from some view).

In mathematics, a vector bundle is a topological construction that makes precise the idea of a family of vector spaces parameterized by another space : to every point of the space we associate a vector space in such a way that these vector spaces fit together to form another space of the same kind as , which is then called a vector bundle over .
In mathematics, the Grassmannian is a differentiable manifold that parameterizes the set of all -dimensional linear subspaces of an -dimensional vector space over a field . For example, the Grassmannian is the space of lines through the origin in , so it is the same as the projective space of one dimension lower than . When is a real or complex vector space, Grassmannians are compact smooth manifolds, of dimension . In general they have the structure of a nonsingular projective algebraic variety.
In mathematics, in particular in algebraic topology and differential geometry, the Stiefel–Whitney classes are a set of topological invariants of a real vector bundle that describe the obstructions to constructing everywhere independent sets of sections of the vector bundle. Stiefel–Whitney classes are indexed from 0 to n, where n is the rank of the vector bundle. If the Stiefel–Whitney class of index i is nonzero, then there cannot exist everywhere linearly independent sections of the vector bundle. A nonzero nth Stiefel–Whitney class indicates that every section of the bundle must vanish at some point. A nonzero first Stiefel–Whitney class indicates that the vector bundle is not orientable. For example, the first Stiefel–Whitney class of the Möbius strip, as a line bundle over the circle, is not zero, whereas the first Stiefel–Whitney class of the trivial line bundle over the circle, , is zero.

In mathematics, a differentiable manifold is a type of manifold that is locally similar enough to a vector space to allow one to apply calculus. Any manifold can be described by a collection of charts (atlas). One may then apply ideas from calculus while working within the individual charts, since each chart lies within a vector space to which the usual rules of calculus apply. If the charts are suitably compatible, then computations done in one chart are valid in any other differentiable chart.
In mathematics, the derivative is a fundamental construction of differential calculus and admits many possible generalizations within the fields of mathematical analysis, combinatorics, algebra, geometry, etc.
In mathematics, a Hilbert manifold is a manifold modeled on Hilbert spaces. Thus it is a separable Hausdorff space in which each point has a neighbourhood homeomorphic to an infinite dimensional Hilbert space. The concept of a Hilbert manifold provides a possibility of extending the theory of manifolds to infinite-dimensional setting. Analogous to the finite-dimensional situation, one can define a differentiable Hilbert manifold by considering a maximal atlas in which the transition maps are differentiable.
In mathematics, a D-module is a module over a ring D of differential operators. The major interest of such D-modules is as an approach to the theory of linear partial differential equations. Since around 1970, D-module theory has been built up, mainly as a response to the ideas of Mikio Sato on algebraic analysis, and expanding on the work of Sato and Joseph Bernstein on the Bernstein–Sato polynomial.
In mathematics, in particular in nonlinear analysis, a Fréchet manifold is a topological space modeled on a Fréchet space in much the same way as a manifold is modeled on a Euclidean space.
In mathematics, in particular in functional analysis and nonlinear analysis, it is possible to define the derivative of a function between two Fréchet spaces. This notion of differentiation, as it is Gateaux derivative between Fréchet spaces, is significantly weaker than the derivative in a Banach space, even between general topological vector spaces. Nevertheless, it is the weakest notion of differentiation for which many of the familiar theorems from calculus hold. In particular, the chain rule is true. With some additional constraints on the Fréchet spaces and functions involved, there is an analog of the inverse function theorem called the Nash–Moser inverse function theorem, having wide applications in nonlinear analysis and differential geometry.
In category theory, a branch of mathematics, a dual object is an analogue of a dual vector space from linear algebra for objects in arbitrary monoidal categories. It is only a partial generalization, based upon the categorical properties of duality for finite-dimensional vector spaces. An object admitting a dual is called a dualizable object. In this formalism, infinite-dimensional vector spaces are not dualizable, since the dual vector space V∗ doesn't satisfy the axioms. Often, an object is dualizable only when it satisfies some finiteness or compactness property.
In mathematics, global analysis, also called analysis on manifolds, is the study of the global and topological properties of differential equations on manifolds and vector bundles. Global analysis uses techniques in infinite-dimensional manifold theory and topological spaces of mappings to classify behaviors of differential equations, particularly nonlinear differential equations. These spaces can include singularities and hence catastrophe theory is a part of global analysis. Optimization problems, such as finding geodesics on Riemannian manifolds, can be solved using differential equations, so that the calculus of variations overlaps with global analysis. Global analysis finds application in physics in the study of dynamical systems and topological quantum field theory.
In mathematics, convenient vector spaces are locally convex vector spaces satisfying a very mild completeness condition.
In representation theory, the category of representations of some algebraic structure A has the representations of A as objects and equivariant maps as morphisms between them. One of the basic thrusts of representation theory is to understand the conditions under which this category is semisimple; i.e., whether an object decomposes into simple objects.
