
A programmable logic controller (PLC) or programmable controller is an industrial computer that has been ruggedized and adapted for the control of manufacturing processes, such as assembly lines, machines, robotic devices, or any activity that requires high reliability, ease of programming, and process fault diagnosis. Dick Morley is considered as the father of PLC as he had invented the first PLC, the Modicon 084, for General Motors in 1968.

An embedded system is a computer system—a combination of a computer processor, computer memory, and input/output peripheral devices—that has a dedicated function within a larger mechanical or electronic system. It is embedded as part of a complete device often including electrical or electronic hardware and mechanical parts. Because an embedded system typically controls physical operations of the machine that it is embedded within, it often has real-time computing constraints. Embedded systems control many devices in common use. In 2009, it was estimated that ninety-eight percent of all microprocessors manufactured were used in embedded systems.

A humanoid robot is a robot resembling the human body in shape. The design may be for functional purposes, such as interacting with human tools and environments, for experimental purposes, such as the study of bipedal locomotion, or for other purposes. In general, humanoid robots have a torso, a head, two arms, and two legs, though some humanoid robots may replicate only part of the body, for example, from the waist up. Some humanoid robots also have heads designed to replicate human facial features such as eyes and mouths. Androids are humanoid robots built to aesthetically resemble humans. hello
Direct memory access (DMA) is a feature of computer systems that allows certain hardware subsystems to access main system memory independently of the central processing unit (CPU).
Domo is an experimental robot made by the Massachusetts Institute of Technology designed to interact with humans. The brainchild of Jeff Weber and Aaron Edsinger, cofounders of Meka Robotics, its name comes from the Japanese phrase for "thank you very much", domo arigato, as well as the Styx song, "Mr. Roboto". The Domo project was originally funded by NASA, and has now been joined by Toyota in funding robot's development.

FANUC is a Japanese group of companies that provide automation products and services such as robotics and computer numerical control wireless systems. These companies are principally FANUC Corporation of Japan, Fanuc America Corporation of Rochester Hills, Michigan, USA, and FANUC Europe Corporation S.A. of Luxembourg.

iCub is a 1 metre tall open source robotics humanoid robot testbed for research into human cognition and artificial intelligence.
Neurorobotics is the combined study of neuroscience, robotics, and artificial intelligence. It is the science and technology of embodied autonomous neural systems. Neural systems include brain-inspired algorithms, computational models of biological neural networks and actual biological systems. Such neural systems can be embodied in machines with mechanic or any other forms of physical actuation. This includes robots, prosthetic or wearable systems but also, at smaller scale, micro-machines and, at the larger scales, furniture and infrastructures.

The IBM 3745 is the latest and last of a 37xx family of communications controllers for the IBM mainframe environment. As of mid-2009 there were an estimated 7,000+ of the larger 3745 models still in active production status, down from 20,000 or more in 2007. The 3745 and associated 3746 models were once heavily used within financial, insurance and retail industries as well as within government agencies globally. However, today most organizations have migrated away from the use of 3745s. IBM's Enterprise Extender and the Communication Controller for Linux on System z (CCL) have largely displaced the older 3745s. IBM announced in September 2002 that it would no longer manufacture new 3745s, but IBM continues to support the hardware by providing worldwide maintenance service, by providing microcode releases and by supporting the associated software including NCP and the virtual telecommunications access method (VTAM). IBM has announced end-of-service dates for Japan, Europe and the Middle East, but has not yet announced end-of-service for the Americas and parts of Asia.
Orchestra Control Engine is a suite of software components used for the planning, development and deployment of real-time control applications for industrial machines and robots.
CompactRIO is a real-time embedded industrial controller made by National Instruments for industrial control systems. The CompactRIO is a combination of a real-time controller, reconfigurable IO Modules (RIO), FPGA module and an Ethernet expansion chassis.

SEROPI is a wheel based humanoid robot developed by KITECH.
LinuxCNC is a free, open-source Linux software system that implements numerical control capability using general purpose computers to control CNC machines. It's mainly intended to run on PC AMD x86-64 systems. Designed by various volunteer developers at linuxcnc.org, it is typically bundled as an ISO file with a modified version of Debian Linux which provides the required real-time kernel.

The ARM Cortex-R is a family of 32-bit and 64-bit RISC ARM processor cores licensed by Arm Ltd. The cores are optimized for hard real-time and safety-critical applications. Cores in this family implement the ARM Real-time (R) profile, which is one of three architecture profiles, the other two being the Application (A) profile implemented by the Cortex-A family and the Microcontroller (M) profile implemented by the Cortex-M family. The ARM Cortex-R family of microprocessors currently consists of ARM Cortex-R4(F), ARM Cortex-R5(F), ARM Cortex-R7(F), ARM Cortex-R8(F), ARM Cortex-R52(F), and ARM Cortex-R82(F).
ArduPilot is an open source, unmanned vehicle Autopilot Software Suite, capable of controlling autonomous:
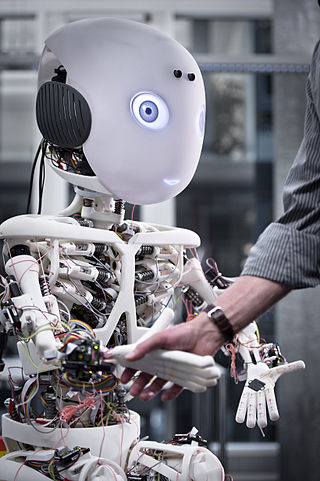
Roboy is an advanced humanoid robot that was developed at the Artificial Intelligence Laboratory of the University of Zurich, and was publicly presented on March 8, 2013. Originally designed to emulate humans with the future possibility of helping out in daily environments, Roboy is a project that has involved both engineers and scientists. Initiated in 2012 by Pascal Kaufmann, Roboy is the work of engineers who designed him according to design principles developed by Prof. Dr. Rolf Pfeifer, the AI lab director, in conjunction with the assistance of other development partners. Both the team members and the partners of the Roboy project share a commitment toward continued research in the area of soft robotics. Later Roboy was moved to Munich, Germany, where Rafael Hostettler conducts research on it at the Technical University. Since July 2020, Roboy is located back in Zurich, Switzerland in the offices of the Mindfire Foundation.

Steam Machine was a series of prebuilt small form factor gaming computers designed to operate Valve's SteamOS to provide a game console-like experience. Several computer vendors were engaged with Valve to develop their own versions of Steam Machines for retail, offering additional options atop Valve's requirements such as dual-booting options with Microsoft Windows and the ability to upgrade the computer. Consumers could digitally purchase video games for their Steam Machine through Valve's popular namesake Steam store, incorporated in SteamOS.

Salvius is the first open source humanoid robot to be built in the United States. Introduced in 2008, Salvius, whose name is derived from the word 'salvaged', has been constructed with an emphasis on using recycled components and materials to reduce the costs of designing and construction. The robot is designed to be able to perform a wide range of tasks by having a body structure that is similar to that of a human. The primary goal for Salvius is to create a robot that can function dynamically in a domestic environment.

Auke Jan Ijspeert is a Swiss-Dutch roboticist and neuroscientist. He is a professor of biorobotics in the Institute of Bioengineering at EPFL, École Polytechnique Fédérale de Lausanne, and the head of the Biorobotics Laboratory at the School of Engineering.