
A current meter is an oceanographic device for flow measurement by mechanical, tilt, acoustical or electrical means.
A current meter is an oceanographic device for flow measurement by mechanical, tilt, acoustical or electrical means.
In physics, one distinguishes different reference frames depending on where the observer is located, this is the basics for the Lagrangian and Eulerian specification of the flow field in fluid dynamics: The observer can be either in the Moving frame (as for a Lagrangian drifter) or in a resting frame.

Mechanical current meters are mostly based on counting the rotations of a propeller and are thus rotor current meters. A mid-20th-century realization is the Ekman current meter which drops balls into a container to count the number of rotations. The Roberts radio current meter is a device mounted on a moored buoy and transmits its findings via radio to a servicing vessel. Savonius current meters rotate around a vertical axis in order to minimize error introduced by vertical motion. [1]
There are two basic types of acoustic current meters: Doppler and Travel Time. Both methods use a ceramic transducer to emit a sound into the water.
Doppler instruments are more common. An instrument of this type is the Acoustic Doppler current profiler (ADCP), which measures the water current velocities over a depth range using the Doppler effect of sound waves scattered back from particles within the water column. The ADCPs use the traveling time of the sound to determine the position of the moving particles. Single-point devices use again the Doppler shift, but ignoring the traveling times. Such a single-point Doppler Current Sensor (DCS) has a typical velocity range of 0 to 300 cm/s. The devices are usually equipped with additional optional sensors.
Travel time instruments determine water velocity by at least two acoustic signals, one up stream and one down stream. By precisely measuring the time to travel from the emitter to the receiver, in both directions, the average water speed can be determined between the two points. By using multiple paths, the water velocity can be determined in three dimensions.
Travel time meters are generally more accurate than Doppler meters, but only record the velocity between the transducers. Doppler meters have the advantage that they can determine the water velocity at a considerable range, and in the case of an ADCP, at multiple ranges.
This novel approach is for instance employed in the Florida Strait where electromagnetic induction in submerged telephone cable is used to estimate the through-flow through the gateway [2] and the complete setup can be seen as one huge current meter. The physics behind: Charged particles (the ions in seawater) are moving with the ocean currents in the magnetic field of the Earth which is perpendicular to the movement. Using Faraday's law of induction (the third of Maxwell's equations), it is possible to evaluate the variability of the averaged horizontal flow by measuring the induced electric currents. The method has a minor vertical weighting effect due to small conductivity changes at different depths. [3]

Tilt current meters operate under the drag-tilt principle and are designed to either float or sink depending on the type. A floating tilt current meter typically consists of a sub-surface buoyant housing that is anchored to the sea floor with a flexible line or tether. A sinking tilt current is similar, but the housing is designed such that the meter hangs from the attachment point. In either case, the housing tilts as a function of its shape, buoyancy (negative or positive) and the water velocity. Once the characteristics of a housing is known, the velocity can be determined by measuring the angle of the housing and direction of tilt. [4] The housing contains a data logger that records the orientation (angle from vertical and compass bearing) of the Tilt Current Meter. Floating tilt current meters are typically deployed on the bottom with a lead or concrete anchor but may be deployed on lobster traps or other convenient anchors of opportunity. [5] Sinking tilt current meters may be attached to an oceanographic mooring, floating dock or fish pen. Tilt current meters have the advantage over other methods of measuring current in that they are generally relatively low-cost instruments and the design and operation is relatively simple. [6] The low-cost of the instrument may allow researchers to use the meters in greater numbers (thereby increasing spatial density) and/or in locations where there is a risk of instrument loss. [7]
Current meters are usually deployed within an oceanographic mooring consisting of an anchor weight on the ground, a mooring line with the instrument(s) connected to it and a floating device to keep the mooring line more or less vertical. Like a kite in the wind, the actual shape of the mooring line will not be completely straight, but following a so-called (half-)catenary. Under the influence of water currents (and wind if the top buoy is above the sea surface) the shape of the mooring line can be determined and by this the actual depth of the instruments. [8] [9] If the currents are strong (above 0.1 m/s) and the mooring lines are long (more than 1 km), the instrument position may vary up to 50 m.

A buoy is a floating device that can have many purposes. It can be anchored (stationary) or allowed to drift with ocean currents.
Flow measurement is the quantification of bulk fluid movement. Flow can be measured using devices called flowmeters in various ways. The common types of flowmeters with industrial applications are listed below:
An acoustic doppler current profiler (ADCP) is a hydroacoustic current meter similar to a sonar, used to measure water current velocities over a depth range using the Doppler effect of sound waves scattered back from particles within the water column. The term ADCP is a generic term for all acoustic current profilers, although the abbreviation originates from an instrument series introduced by RD Instruments in the 1980s. The working frequencies range of ADCPs range from 38 kHz to several megahertz.

Sodar, an acronym of sonic detection and ranging, is a meteorological instrument used as a wind profiler based on the scattering of sound waves by atmospheric turbulence. Sodar equipment is used to measure wind speed at various heights above the ground, and the thermodynamic structure of the lower layer of the atmosphere.
A mooring in oceanography is a collection of devices connected to a wire and anchored on the sea floor. It is the Eulerian way of measuring ocean currents, since a mooring is stationary at a fixed location. In contrast to that, the Lagrangian way measures the motion of an oceanographic drifter, the Lagrangian drifter.

Wave radar is a type of radar for measuring wind waves. Several instruments based on a variety of different concepts and techniques are available, and these are all often called. This article, gives a brief description of the most common ground-based radar remote sensing techniques.

For a pure wave motion in fluid dynamics, the Stokes drift velocity is the average velocity when following a specific fluid parcel as it travels with the fluid flow. For instance, a particle floating at the free surface of water waves, experiences a net Stokes drift velocity in the direction of wave propagation.

A drifter is an oceanographic device floating on the surface to investigate ocean currents by tracking location. They can also measure other parameters like sea surface temperature, salinity, barometric pressure, and wave height. Modern drifters are typically tracked by satellite, often GPS. They are sometimes called Lagrangian drifters since the location of the measurements they make moves with the flow. A major user of drifters is NOAA's Global Drifter Program.
An acoustic release is an oceanographic device for the deployment and subsequent recovery of instrumentation from the sea floor, in which the recovery is triggered remotely by an acoustic command signal.

NOAAS Henry B. Bigelow is a fisheries research vessel operated by the United States' National Oceanic Atmospheric Administration (NOAA). She is the second in a class of five fisheries research vessels. She is named after Henry Bryant Bigelow (1879-1967), the American oceanographer, zoologist, and marine biologist who founded the Woods Hole Oceanographic Institution in Woods Hole, Massachusetts.
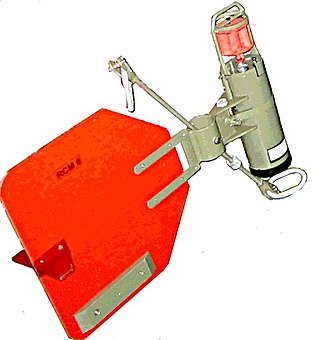
A rotor current meter (RCM) is a mechanical current meter, an oceanographic device deployed within an oceanographic mooring measuring the flow within the world oceans to learn more about ocean currents. Many RCMs have been replaced by instruments measuring the flow by hydroacoustics, the so-called Acoustic Doppler Current Profilers. However, for instance in Fram Strait, the Alfred Wegener Institute still uses RCMs for long-term monitoring the inflow into the Arctic Ocean.
The Tropical Atmosphere Ocean (TAO) project is a major international effort that instrumented the entire tropical Pacific Ocean with approximately 70 deep ocean moorings. The development of the TAO array in 1985 was motivated by the 1982-1983 El Niño event and ultimately designed for the study of year-to-year climate variations related to El Niño and the Southern Oscillation (ENSO). Led by the TAO Project Office of the Pacific Marine Environmental Laboratory (PMEL), the full array of 70 moorings was completed in 1994.
The Research Moored Array for African-Asian-Australian Monsoon Analysis and Prediction (RAMA) is a system of moored observation buoys in the Indian Ocean that collects meteorological and oceanographic data. The data collected by RAMA will greatly enhance the ability of scientists to understand climatic events and predict monsoon events. Climatic and oceanic events in the Indian Ocean affect weather and climate throughout the rest of the world, so RAMA will support weather forecasting and climate research worldwide. Although widely supported internationally, the system has only been partially implemented due to pirate activity off the coast of Somalia.

The Prediction and Research Moored Array in the Atlantic (PIRATA) is a system of moored observation buoys in the tropical Atlantic Ocean which collect meteorological and oceanographic data. The data collected by the PIRATA array helps scientists to better understand climatic events in the Tropical Atlantic and to improve weather forecasting and climate research worldwide. Climatic and oceanic events in the tropical Atlantic, such as the Tropical Atlantic SST Dipole affect rainfall and climate in both West Africa and Northeast Brazil. The northern tropical Atlantic is also a major formation area for hurricanes affecting the West Indies and the United States. Alongside the RAMA array in the Indian Ocean and the TAO/TRITON network in the Pacific Ocean, PIRATA forms part of the worldwide system of tropical ocean observing buoys.

A float is an oceanographic instrument platform used for making subsurface measurements in the ocean without the need for a ship, propeller, or a person operating it. Floats measure the physical and chemical aspects of the ocean in detail, such as measuring the direction and speed of water or the temperature and salinity. A float will descend to a predetermined depth where it will be neutrally buoyant. Once a certain amount of time has passed, most floats will rise back to the surface by increasing its buoyancy so it can transmit the data it collected to a satellite. A float can collect data while it is neutrally buoyant or moving through the water column. Often, floats are treated as disposable, as the expense of recovering them from remote areas of the ocean is prohibitive; when the batteries fail, a float ceases to function, and drifts at depth until it runs aground or floods and sinks. In other cases, floats are deployed for a short time and recovered.

The Global Drifter Program (GDP) was conceived by Prof. Peter Niiler, with the objective of collecting measurements of surface ocean currents, sea surface temperature and sea-level atmospheric pressure using drifters. It is the principal component of the Global Surface Drifting Buoy Array, a branch of NOAA's Global Ocean Observations and a scientific project of the Data Buoy Cooperation Panel (DBCP). The project originated in February 1979 as part of the TOGA/Equatorial Pacific Ocean Circulation Experiment (EPOCS) and the first large-scale deployment of drifters was in 1988 with the goal of mapping the tropical Pacific Ocean's surface circulation. The current goal of the project is to use 1250 satellite-tracked surface drifting buoys to make accurate and globally dense in-situ observations of mixed layer currents, sea surface temperature, atmospheric pressure, winds and salinity, and to create a system to process the data. Horizontal transports in the oceanic mixed layer measured by the GDP are relevant to biological and chemical processes as well as physical ones.

NOAAS Oscar Dyson is an American fisheries and oceanographic research vessel in commission in the National Oceanic and Atmospheric Administration (NOAA) fleet since 2005.

NOAAS Pisces is an American fisheries and oceanographic research vessel in commission in the National Oceanic and Atmospheric Administration (NOAA) fleet since 2009.

A fixed-point ocean observatory is an ocean observing autonomous system of automatic sensors and samplers that continuously gathers data from deep sea, water column and lower atmosphere, and transmits the data to shore in real or near real-time.

JS Shōnan (AGS-5106) is the only ship of her type of oceanographic research ship for the Japan Maritime Self-Defense Force.