
In geometry, an octahedron is a polyhedron with eight faces. The term is most commonly used to refer to the regular octahedron, a Platonic solid composed of eight equilateral triangles, four of which meet at each vertex.

In geometry, a tetrahedron, also known as a triangular pyramid, is a polyhedron composed of four triangular faces, six straight edges, and four vertex corners. The tetrahedron is the simplest of all the ordinary convex polyhedra.

In geometry, a tesseract is the four-dimensional analogue of the cube; the tesseract is to the cube as the cube is to the square. Just as the surface of the cube consists of six square faces, the hypersurface of the tesseract consists of eight cubical cells. The tesseract is one of the six convex regular 4-polytopes.

In four-dimensional geometry, the 24-cell is the convex regular 4-polytope (four-dimensional analogue of a Platonic solid) with Schläfli symbol {3,4,3}. It is also called C24, or the icositetrachoron, octaplex (short for "octahedral complex"), icosatetrahedroid, octacube, hyper-diamond or polyoctahedron, being constructed of octahedral cells.
In geometry, the Dehn invariant is a value used to determine whether one polyhedron can be cut into pieces and reassembled ("dissected") into another, and whether a polyhedron or its dissections can tile space. It is named after Max Dehn, who used it to solve Hilbert's third problem by proving that not all polyhedra with equal volume could be dissected into each other.

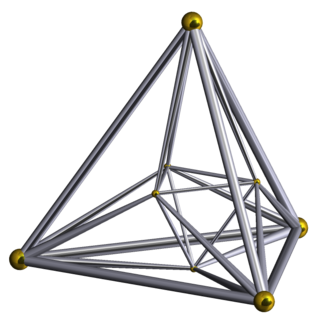
In geometry, the 5-cell is the convex 4-polytope with Schläfli symbol {3,3,3}. It is a 5-vertex four-dimensional object bounded by five tetrahedral cells. It is also known as a C5, pentachoron, pentatope, pentahedroid, or tetrahedral pyramid. It is the 4-simplex (Coxeter's polytope), the simplest possible convex 4-polytope, and is analogous to the tetrahedron in three dimensions and the triangle in two dimensions. The 5-cell is a 4-dimensional pyramid with a tetrahedral base and four tetrahedral sides.

Hugo Hadwiger was a Swiss mathematician, known for his work in geometry, combinatorics, and cryptography.
In geometry, the 16-cell is the regular convex 4-polytope (four-dimensional analogue of a Platonic solid) with Schläfli symbol {3,3,4}. It is one of the six regular convex 4-polytopes first described by the Swiss mathematician Ludwig Schläfli in the mid-19th century. It is also called C16, hexadecachoron, or hexdecahedroid [sic?].

A convex polytope is a special case of a polytope, having the additional property that it is also a convex set contained in the -dimensional Euclidean space . Most texts use the term "polytope" for a bounded convex polytope, and the word "polyhedron" for the more general, possibly unbounded object. Others allow polytopes to be unbounded. The terms "bounded/unbounded convex polytope" will be used below whenever the boundedness is critical to the discussed issue. Yet other texts identify a convex polytope with its boundary.

In geometry of 4 dimensions or higher, a double prism or duoprism is a polytope resulting from the Cartesian product of two polytopes, each of two dimensions or higher. The Cartesian product of an n-polytope and an m-polytope is an (n+m)-polytope, where n and m are dimensions of 2 (polygon) or higher.

The tetrahedral-octahedral honeycomb, alternated cubic honeycomb is a quasiregular space-filling tessellation in Euclidean 3-space. It is composed of alternating regular octahedra and tetrahedra in a ratio of 1:2.

The quarter cubic honeycomb, quarter cubic cellulation or bitruncated alternated cubic honeycomb is a space-filling tessellation in Euclidean 3-space. It is composed of tetrahedra and truncated tetrahedra in a ratio of 1:1. It is called "quarter-cubic" because its symmetry unit – the minimal block from which the pattern is developed by reflections – is four times that of the cubic honeycomb.
In five-dimensional geometry, a rectified 5-simplex is a convex uniform 5-polytope, being a rectification of the regular 5-simplex.

In 7-dimensional geometry, 231 is a uniform polytope, constructed from the E7 group.
In geometry, the Hill tetrahedra are a family of space-filling tetrahedra. They were discovered in 1896 by M. J. M. Hill, a professor of mathematics at the University College London, who showed that they are scissor-congruent to a cube.
In geometry, a Schläfli orthoscheme is a type of simplex. The orthoscheme is the generalization of the right triangle to simplex figures of any number of dimensions. Orthoschemes are defined by a sequence of edges that are mutually orthogonal. They were introduced by Ludwig Schläfli, who called them orthoschemes and studied their volume in Euclidean, hyperbolic, and spherical geometries. H. S. M. Coxeter later named them after Schläfli. As right triangles provide the basis for trigonometry, orthoschemes form the basis of a trigonometry of n dimensions, as developed by Schoute who called it polygonometry. J.-P. Sydler and Børge Jessen studied orthoschemes extensively in connection with Hilbert's third problem.

In combinatorial geometry, the Hadwiger conjecture states that any convex body in n-dimensional Euclidean space can be covered by 2n or fewer smaller bodies homothetic with the original body, and that furthermore, the upper bound of 2n is necessary if and only if the body is a parallelepiped. There also exists an equivalent formulation in terms of the number of floodlights needed to illuminate the body.
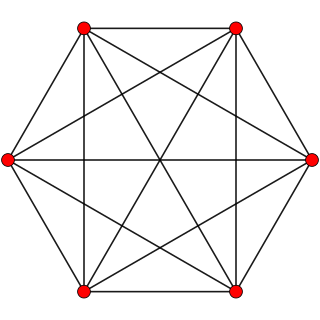
In geometry and polyhedral combinatorics, a k-neighborly polytope is a convex polytope in which every set of k or fewer vertices forms a face. For instance, a 2-neighborly polytope is a polytope in which every pair of vertices is connected by an edge, forming a complete graph. 2-neighborly polytopes with more than four vertices may exist only in spaces of four or more dimensions, and in general a k-neighborly polytope requires a dimension of 2k or more. A d-simplex is d-neighborly. A polytope is said to be neighborly, without specifying k, if it is k-neighborly for k = ⌊d⁄2⌋. If we exclude simplices, this is the maximum possible k: in fact, every polytope that is k-neighborly for some k ≥ 1 + ⌊d⁄2⌋ is a simplex.
In geometry, Kalai's 3d conjecture is a conjecture on the polyhedral combinatorics of centrally symmetric polytopes, made by Gil Kalai in 1989. It states that every d-dimensional centrally symmetric polytope has at least 3d nonempty faces.











