Important theorems of screw theory include: The Transfer Principle proves that geometric calculations for points using vectors have parallel geometric calculations for lines obtained by replacing vectors with screws.[4]Chasles' theorem proves that any change between two rigid object poses can be performed by a single screw. Poinsot's theorem proves that rotations about a rigid object's major and minor -- but not intermediate -- axes are stable.
Screw theory is an important tool in robot mechanics,[5][6][7][8] mechanical design, computational geometry and multibody dynamics. This is in part because of the relationship between screws and dual quaternions which have been used to interpolate rigid-body motions.[9] Based on screw theory, an efficient approach has also been developed for the type synthesis of parallel mechanisms (parallel manipulators or parallel robots).[10]
Basic concepts
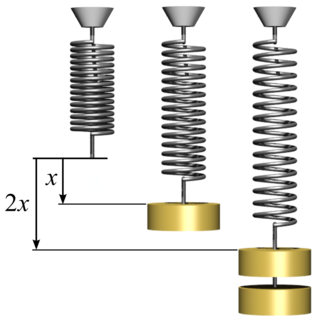
The pitch of a pure screw relates rotation about an axis to translation along that axis.
A spatial displacement of a rigid body can be defined by a rotation about a line and a translation along the same line, called a screw motion. This is known as Chasles' theorem. The six parameters that define a screw motion are the four independent components of the Plücker vector that defines the screw axis, together with the rotation angle about and linear slide along this line, and form a pair of vectors called a screw. For comparison, the six parameters that define a spatial displacement can also be given by three Euler angles that define the rotation and the three components of the translation vector.
Screw
A screw is a six-dimensional vector constructed from a pair of three-dimensional vectors, such as forces and torques and linear and angular velocity, that arise in the study of spatial rigid body movement. The components of the screw define the Plücker coordinates of a line in space and the magnitudes of the vector along the line and moment about this line.
Twist
A twist is a screw used to represent the velocity of a rigid body as an angular velocity around an axis and a linear velocity along this axis. All points in the body have the same component of the velocity along the axis, however the greater the distance from the axis the greater the velocity in the plane perpendicular to this axis. Thus, the helicoidal field formed by the velocity vectors in a moving rigid body flattens out the further the points are radially from the twist axis.
The points in a body undergoing a constant twist motion trace helices in the fixed frame. If this screw motion has zero pitch then the trajectories trace circles, and the movement is a pure rotation. If the screw motion has infinite pitch then the trajectories are all straight lines in the same direction.
Wrench
The force and torque vectors that arise in applying Newton's laws to a rigid body can be assembled into a screw called a wrench. A force has a point of application and a line of action, therefore it defines the Plücker coordinates of a line in space and has zero pitch. A torque, on the other hand, is a pure moment that is not bound to a line in space and is an infinite pitch screw. The ratio of these two magnitudes defines the pitch of the screw.
Algebra of screws
Let a screw be an ordered pair
where S and V are three-dimensional real vectors. The sum and difference of these ordered pairs are computed componentwise. Screws are often called dual vectors.
Now, introduce the ordered pair of real numbers â=(a,b) called a dual scalar. Let the addition and subtraction of these numbers be componentwise, and define multiplication as
The multiplication of a screw S=(S,V) by the dual scalar â=(a,b) is computed componentwise to be,
Finally, introduce the dot and cross products of screws by the formulas:
which is a dual scalar, and
which is a screw. The dot and cross products of screws satisfy the identities of vector algebra, and allow computations that directly parallel computations in the algebra of vectors.
Let the dual scalar ẑ=(φ,d) define a dual angle, then the infinite series definitions of sine and cosine yield the relations
which are also dual scalars. In general, the function of a dual variable is defined to be f(ẑ)=(f(φ),df′(φ)), where df′(φ) is the derivative off(φ).
Let ẑ=(φ,d) be the dual angle, where φ is the angle between the axes of S and T around their common normal, and d is the distance between these axes along the common normal, then
Let N be the unit screw that defines the common normal to the axes of S and T, and ẑ=(φ,d) is the dual angle between these axes, then
Wrench
A common example of a screw is the wrench associated with a force acting on a rigid body. Let P be the point of application of the force F and let P be the vector locating this point in a fixed frame. The wrench W = (F, P×F) is a screw. The resultant force and moment obtained from all the forces Fi, i=1,...,n, acting on a rigid body is simply the sum of the individual wrenches Wi, that is
Notice that the case of two equal but opposite forces F and −F acting at points A and B respectively, yields the resultant
This shows that screws of the form
can be interpreted as pure moments.
Twist
In order to define the twist of a rigid body, we must consider its movement defined by the parameterized set of spatial displacements, D(t)=([A(t)],d(t)), where [A] is a rotation matrix and d is a translation vector. This causes a point p that is fixed in moving body coordinates to trace a curve P(t) in the fixed frame given by,
The velocity of P is
where v is velocity of the origin of the moving frame, that is dd/dt. Now substitute p= [AT](P−d) into this equation to obtain,
where [Ω]=[dA/dt][AT] is the angular velocity matrix and ω is the angular velocity vector.
The screw
is the twist of the moving body. The vector V=v+d×ω is the velocity of the point in the body that corresponds with the origin of the fixed frame.
There are two important special cases: (i) when d is constant, that is v=0, then the twist is a pure rotation about a line, then the twist is
and (ii) when [Ω]=0, that is the body does not rotate but only slides in the direction v, then the twist is a pure slide given by
Revolute joints
For a revolute joint, let the axis of rotation pass through the point q and be directed along the vector ω, then the twist for the joint is given by,
Prismatic joints
For a prismatic joint, let the vector v pointing define the direction of the slide, then the twist for the joint is given by,
Coordinate transformation of screws
The coordinate transformations for screws are easily understood by beginning with the coordinate transformations of the Plücker vector of line, which in turn are obtained from the transformations of the coordinate of points on the line.
Let the displacement of a body be defined by D=([A],d), where [A] is the rotation matrix and d is the translation vector. Consider the line in the body defined by the two points p and q, which has the Plücker coordinates,
then in the fixed frame we have the transformed point coordinates P=[A]p+d and Q=[A]q+d, which yield.
Thus, a spatial displacement defines a transformation for Plücker coordinates of lines given by
The matrix [D] is the skew-symmetric matrix that performs the cross product operation, that is [D]y=d×y.
The 6×6 matrix obtained from the spatial displacement D=([A],d) can be assembled into the dual matrix
which operates on a screw s=(s.v) to obtain,
The dual matrix [Â]=([A],[DA]) has determinant 1 and is called a dual orthogonal matrix.
Twists as elements of a Lie algebra
Consider the movement of a rigid body defined by the parameterized 4x4 homogeneous transform,
This notation does not distinguish between P = (X, Y, Z, 1), and P = (X, Y, Z), which is hopefully clear in context.
The velocity of this movement is defined by computing the velocity of the trajectories of the points in the body,
The dot denotes the derivative with respect to time, and because p is constant its derivative is zero.
Substitute the inverse transform for p into the velocity equation to obtain the velocity of P by operating on its trajectory P(t), that is
where
Recall that [Ω] is the angular velocity matrix. The matrix [S] is an element of the Lie algebra se(3) of the Lie group SE(3) of homogeneous transforms. The components of [S] are the components of the twist screw, and for this reason [S] is also often called a twist.
From the definition of the matrix [S], we can formulate the ordinary differential equation,
and ask for the movement [T(t)] that has a constant twist matrix [S]. The solution is the matrix exponential
This formulation can be generalized such that given an initial configuration g(0) in SE(n), and a twist ξ in se(n), the homogeneous transformation to a new location and orientation can be computed with the formula,
where θ represents the parameters of the transformation.
Screws by reflection
In transformation geometry, the elemental concept of transformation is the reflection (mathematics). In planar transformations a translation is obtained by reflection in parallel lines, and rotation is obtained by reflection in a pair of intersecting lines. To produce a screw transformation from similar concepts one must use planes in space: the parallel planes must be perpendicular to the screw axis, which is the line of intersection of the intersecting planes that generate the rotation of the screw. Thus four reflections in planes effect a screw transformation. The tradition of inversive geometry borrows some of the ideas of projective geometry and provides a language of transformation that does not depend on analytic geometry.
Homography
The combination of a translation with a rotation effected by a screw displacement can be illustrated with the exponential mapping.
Since ε2 = 0 for dual numbers, exp(aε) = 1 + aε, all other terms of the exponential series vanishing.
Let F = {1 + εr: r ∈ H}, ε2 = 0. Note that F is stable under the rotationq → p−1qp and under the translation (1 + εr)(1 + εs) = 1 + ε (r + s) for any vector quaternions r and s. F is a 3-flat in the eight-dimensional space of dual quaternions. This 3-flat F represents space, and the homography constructed, restricted to F, is a screw displacement of space.
Let a be half the angle of the desired turn about axis r, and br half the displacement on the screw axis. Then form z = exp((a + bε)r ) and z* = exp((a − bε)r). Now the homography is
The inverse for z* is
so, the homography sends q to
Now for any quaternion vector p, p* = −p, let q = 1 + pε ∈ Fwhere the required rotation and translation are effected.
Evidently the group of units of the ring of dual quaternions is a Lie group. A subgroup has Lie algebra generated by the parameters a r and b s, where a, b ∈ R, and r, s ∈ H. These six parameters generate a subgroup of the units, the unit sphere. Of course it includes F and the 3-sphere of versors.
Work of forces acting on a rigid body
Consider the set of forces F1, F2 ... Fn act on the points X1, X2 ... Xn in a rigid body. The trajectories of Xi, i=1,...,n are defined by the movement of the rigid body with rotation [A(t)] and the translation d(t) of a reference point in the body, given by
where xi are coordinates in the moving body.
The velocity of each point Xi is
where ω is the angular velocity vector and v is the derivative of d(t).
The work by the forces over the displacement δri=viδt of each point is given by
Define the velocities of each point in terms of the twist of the moving body to obtain
Expand this equation and collect coefficients of ω and v to obtain
Introduce the twist of the moving body and the wrench acting on it given by
then work takes the form
The 6×6 matrix [Π] is used to simplify the calculation of work using screws, so that
where
and [I] is the 3×3 identity matrix.
Reciprocal screws
If the virtual work of a wrench on a twist is zero, then the forces and torque of the wrench are constraint forces relative to the twist. The wrench and twist are said to be reciprocal, that is if
then the screws W and T are reciprocal.
Twists in robotics
In the study of robotic systems the components of the twist are often transposed to eliminate the need for the 6×6 matrix [Π] in the calculation of work.[4] In this case the twist is defined to be
so the calculation of work takes the form
In this case, if
then the wrench W is reciprocal to the twist T.
History
The mathematical framework was developed by Sir Robert Stawell Ball in 1876 for application in kinematics and statics of mechanisms (rigid body mechanics).[3]
William Kingdon Clifford initiated the use of dual quaternions for kinematics, followed by Aleksandr Kotelnikov, Eduard Study (Geometrie der Dynamen), and Wilhelm Blaschke. However, the point of view of Sophus Lie has recurred.[14] In 1940, Julian Coolidge described the use of dual quaternions for screw displacements on page 261 of A History of Geometrical Methods. He notes the 1885 contribution of Arthur Buchheim.[15] Coolidge based his description simply on the tools Hamilton had used for real quaternions.
A centripetal force is a force that makes a body follow a curved path. The direction of the centripetal force is always orthogonal to the motion of the body and towards the fixed point of the instantaneous center of curvature of the path. Isaac Newton described it as "a force by which bodies are drawn or impelled, or in any way tend, towards a point as to a centre". In Newtonian mechanics, gravity provides the centripetal force causing astronomical orbits.
Kinematics is a subfield of physics and mathematics, developed in classical mechanics, that describes the motion of points, bodies (objects), and systems of bodies without considering the forces that cause them to move. Kinematics, as a field of study, is often referred to as the "geometry of motion" and is occasionally seen as a branch of both applied and pure mathematics since it can be studied without considering the mass of a body or the forces acting upon it. A kinematics problem begins by describing the geometry of the system and declaring the initial conditions of any known values of position, velocity and/or acceleration of points within the system. Then, using arguments from geometry, the position, velocity and acceleration of any unknown parts of the system can be determined. The study of how forces act on bodies falls within kinetics, not kinematics. For further details, see analytical dynamics.
In physics, work is the energy transferred to or from an object via the application of force along a displacement. In its simplest form, for a constant force aligned with the direction of motion, the work equals the product of the force strength and the distance traveled. A force is said to do positive work if when applied it has a component in the direction of the displacement of the point of application. A force does negative work if it has a component opposite to the direction of the displacement at the point of application of the force.
In vector calculus, the divergence theorem, also known as Gauss's theorem or Ostrogradsky's theorem, is a theorem relating the flux of a vector field through a closed surface to the divergence of the field in the volume enclosed.
The moment of inertia, otherwise known as the mass moment of inertia, angular/rotational mass, second moment of mass, or most accurately, rotational inertia, of a rigid body is a quantity that determines the torque needed for a desired angular acceleration about a rotational axis, akin to how mass determines the force needed for a desired acceleration. It depends on the body's mass distribution and the axis chosen, with larger moments requiring more torque to change the body's rate of rotation by a given amount.
In the mathematical field of differential geometry, a metric tensor is an additional structure on a manifold M that allows defining distances and angles, just as the inner product on a Euclidean space allows defining distances and angles there. More precisely, a metric tensor at a point p of M is a bilinear form defined on the tangent space at p, and a metric field on M consists of a metric tensor at each point p of M that varies smoothly with p.
In physics, Hooke's law is an empirical law which states that the force needed to extend or compress a spring by some distance scales linearly with respect to that distance—that is, Fs = kx, where k is a constant factor characteristic of the spring, and x is small compared to the total possible deformation of the spring. The law is named after 17th-century British physicist Robert Hooke. He first stated the law in 1676 as a Latin anagram. He published the solution of his anagram in 1678 as: ut tensio, sic vis. Hooke states in the 1678 work that he was aware of the law since 1660.
In the physical science of dynamics, rigid-body dynamics studies the movement of systems of interconnected bodies under the action of external forces. The assumption that the bodies are rigid simplifies analysis, by reducing the parameters that describe the configuration of the system to the translation and rotation of reference frames attached to each body. This excludes bodies that display fluid, highly elastic, and plastic behavior.
In quantum physics, Fermi's golden rule is a formula that describes the transition rate from one energy eigenstate of a quantum system to a group of energy eigenstates in a continuum, as a result of a weak perturbation. This transition rate is effectively independent of time and is proportional to the strength of the coupling between the initial and final states of the system as well as the density of states. It is also applicable when the final state is discrete, i.e. it is not part of a continuum, if there is some decoherence in the process, like relaxation or collision of the atoms, or like noise in the perturbation, in which case the density of states is replaced by the reciprocal of the decoherence bandwidth.
In mechanics, virtual work arises in the application of the principle of least action to the study of forces and movement of a mechanical system. The work of a force acting on a particle as it moves along a displacement is different for different displacements. Among all the possible displacements that a particle may follow, called virtual displacements, one will minimize the action. This displacement is therefore the displacement followed by the particle according to the principle of least action.
The work of a force on a particle along a virtual displacement is known as the virtual work.
In geometry and linear algebra, a Cartesian tensor uses an orthonormal basis to represent a tensor in a Euclidean space in the form of components. Converting a tensor's components from one such basis to another is done through an orthogonal transformation.
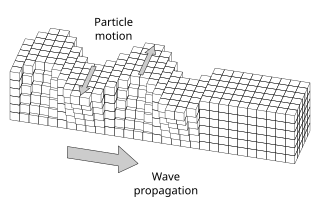
In elastodynamics, Love waves, named after Augustus Edward Hough Love, are horizontally polarized surface waves. The Love wave is a result of the interference of many shear waves (S-waves) guided by an elastic layer, which is welded to an elastic half space on one side while bordering a vacuum on the other side. In seismology, Love waves (also known as Q waves (Quer: German for lateral)) are surface seismic waves that cause horizontal shifting of the Earth during an earthquake. Augustus Edward Hough Love predicted the existence of Love waves mathematically in 1911. They form a distinct class, different from other types of seismic waves, such as P-waves and S-waves (both body waves), or Rayleigh waves (another type of surface wave). Love waves travel with a lower velocity than P- or S- waves, but faster than Rayleigh waves. These waves are observed only when there is a low velocity layer overlying a high velocity layer/ sub–layers.
In geometry, various formalisms exist to express a rotation in three dimensions as a mathematical transformation. In physics, this concept is applied to classical mechanics where rotational kinematics is the science of quantitative description of a purely rotational motion. The orientation of an object at a given instant is described with the same tools, as it is defined as an imaginary rotation from a reference placement in space, rather than an actually observed rotation from a previous placement in space.
In mathematics, the dual quaternions are an 8-dimensional real algebra isomorphic to the tensor product of the quaternions and the dual numbers. Thus, they may be constructed in the same way as the quaternions, except using dual numbers instead of real numbers as coefficients. A dual quaternion can be represented in the form A + εB, where A and B are ordinary quaternions and ε is the dual unit, which satisfies ε2 = 0 and commutes with every element of the algebra. Unlike quaternions, the dual quaternions do not form a division algebra.
In mathematics, the axis–angle representation parameterizes a rotation in a three-dimensional Euclidean space by two quantities: a unit vector e indicating the direction (geometry) of an axis of rotation, and an angle of rotation θ describing the magnitude and sense of the rotation about the axis. Only two numbers, not three, are needed to define the direction of a unit vector e rooted at the origin because the magnitude of e is constrained. For example, the elevation and azimuth angles of e suffice to locate it in any particular Cartesian coordinate frame.
The angular velocity tensor is a skew-symmetric matrix defined by:
In classical mechanics, Appell's equation of motion is an alternative general formulation of classical mechanics described by Josiah Willard Gibbs in 1879 and Paul Émile Appell in 1900.
Stokes' theorem, also known as the Kelvin–Stokes theorem after Lord Kelvin and George Stokes, the fundamental theorem for curls or simply the curl theorem, is a theorem in vector calculus on . Given a vector field, the theorem relates the integral of the curl of the vector field over some surface, to the line integral of the vector field around the boundary of the surface. The classical theorem of Stokes can be stated in one sentence: The line integral of a vector field over a loop is equal to the surface integral of its curl over the enclosed surface. It is illustrated in the figure, where the direction of positive circulation of the bounding contour ∂Σ, and the direction n of positive flux through the surface Σ, are related by a right-hand-rule. For the right hand the fingers circulate along ∂Σ and the thumb is directed along n.
In continuum mechanics, the strain-rate tensor or rate-of-strain tensor is a physical quantity that describes the rate of change of the strain of a material in the neighborhood of a certain point, at a certain moment of time. It can be defined as the derivative of the strain tensor with respect to time, or as the symmetric component of the Jacobian matrix of the flow velocity. In fluid mechanics it also can be described as the velocity gradient, a measure of how the velocity of a fluid changes between different points within the fluid. Though the term can refer to a velocity profile, it is often used to mean the gradient of a flow's velocity with respect to its coordinates. The concept has implications in a variety of areas of physics and engineering, including magnetohydrodynamics, mining and water treatment.
The streamline upwind Petrov–Galerkin pressure-stabilizing Petrov–Galerkin formulation for incompressible Navier–Stokes equations can be used for finite element computations of high Reynolds number incompressible flow using equal order of finite element space by introducing additional stabilization terms in the Navier–Stokes Galerkin formulation.
↑ Selig, J. M. (2011) "Rational Interpolation of Rigid Body Motions," Advances in the Theory of Control, Signals and Systems with Physical Modeling, Lecture Notes in Control and Information Sciences, Volume 407/2011 213–224, doi:10.1007/978-3-642-16135-3_18 Springer.
↑ Clifford, William Kingdon (1873), "Preliminary Sketch of Biquaternions", Paper XX, Mathematical Papers, p.381.
↑ Xiangke Wang, Dapeng Han, Changbin Yu, and Zhiqiang Zheng (2012) "The geometric structure of unit dual quaternions with application in kinematic control", Journal of Mathematical Analysis and Applications 389(2):1352 to 64
This page is based on this Wikipedia article Text is available under the CC BY-SA 4.0 license; additional terms may apply. Images, videos and audio are available under their respective licenses.